
Die Wahl zwischen einem Schrittmotor und einem BLDC-Motor (bürstenloser Gleichstrommotor) ist eines der häufigsten Dilemmata in der Industrieautomation. Beide sind bürstenlos, beide verwenden Permanentmagnet-Rotoren, und ihre Datenblätter sehen oft täuschend ähnlich aus – dabei verhalten sie sich völlig unterschiedlich, sobald sie in ein reales System integriert sind. Dieser Leitfaden arbeitet die wesentlichen technischen Unterschiede heraus, erklärt, wann jeder Motortyp den anderen tatsächlich übertrifft, und hilft Ihnen, einen Auswahlrahmen für Ihre spezifischen Anwendungsbedingungen aufzubauen.
Dieser Artikel gehört zu einer technischen Reihe. Die zentrale Übersicht: Schrittmotor Grundlagen: Typen, Auswahl & OEM. Ergänzend: Wie funktioniert ein Schrittmotor?, das Schrittmotor Funktionsprinzip, der Schrittmotor Typen Vergleich, Hybrid vs Permanentmagnet, Schrittwinkel: 1,8° vs 0,9°, Schrittmotor Phasen und die Schrittmotor Drehmomentkurve.
Der grundlegende Unterschied
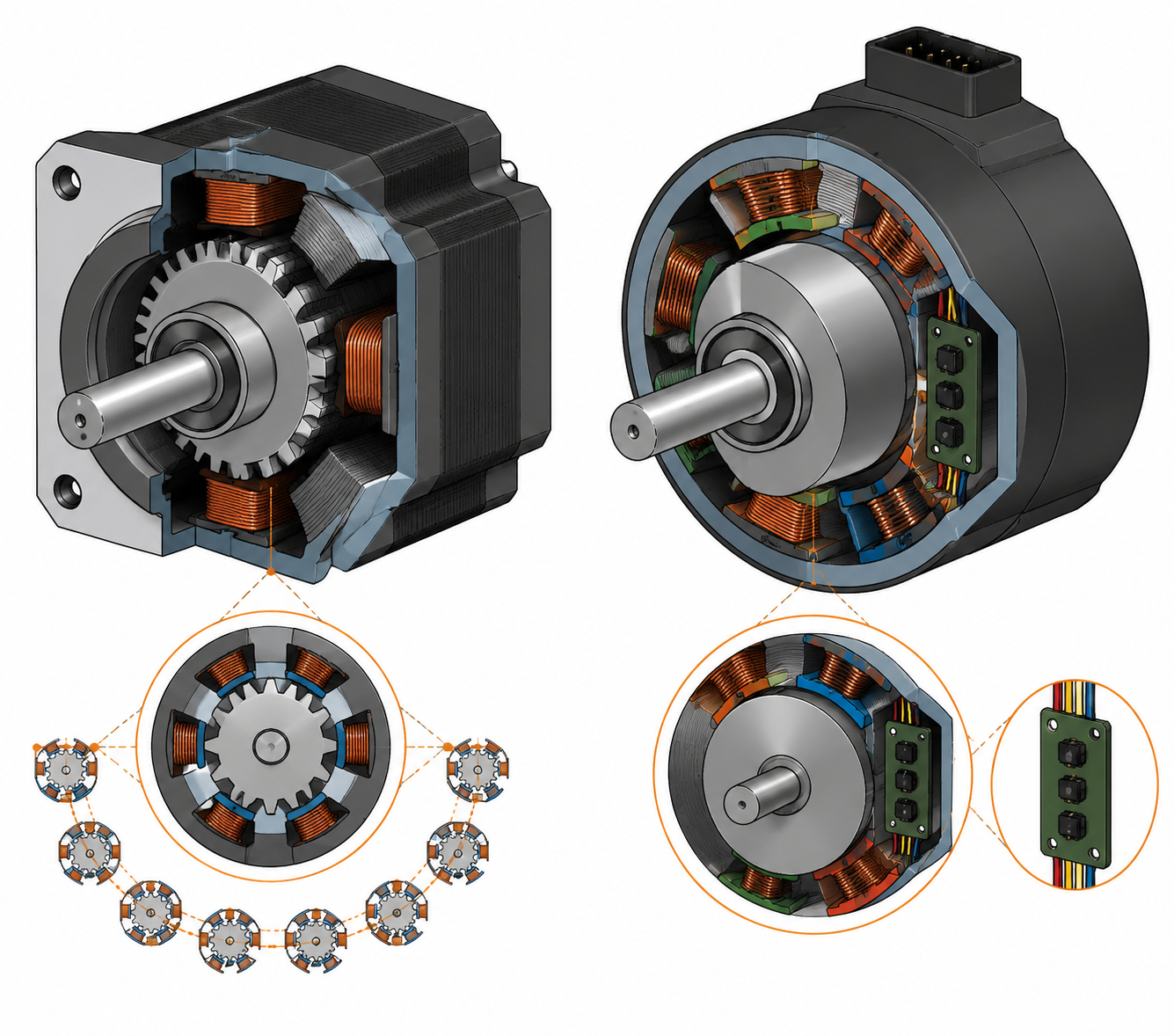
Trotz oberflächlicher Ähnlichkeiten basieren Schrittmotoren und BLDC-Motoren auf grundlegend unterschiedlichen Konstruktionsphilosophien.
Ein Schrittmotor hat einen Stator mit hoher Polzahl und einen gezahnten Rotor (in der Hybrid-Ausführung). Jeder elektrische Impuls bewegt die Welle um einen festen Schrittwinkel – typischerweise 1,8°, was 200 Schritte pro Umdrehung ergibt. Dieser „Impulse-zählen"-Ansatz ermöglicht Open-Loop-Positionssteuerung: Es wird keine Encoder-Rückführung benötigt, weil die Steuerung einfach mitzählt, wie viele Schritte sie befohlen hat.
Ein BLDC-Motor hat typischerweise drei Phasen und eine niedrigere Polzahl. Er ist im Wesentlichen ein Gleichstrommotor, bei dem der mechanische Kommutator durch Elektronik ersetzt wurde. Ein BLDC-Treiber liest kontinuierlich Hall-Sensorsignale, um die Rotorposition zu bestimmen und zu entscheiden, welche Phase als nächstes bestromt wird – das macht ihn vom Einschalten an zu einem inhärent geschlossenen Regelsystem.
Kurz gesagt: Schrittmotoren positionieren durch Impulszählung; BLDC-Motoren regeln Drehzahl und Drehmoment durch kontinuierliche Sensorrückführung.
Drehmoment und Drehzahl: Die entscheidende Dimension
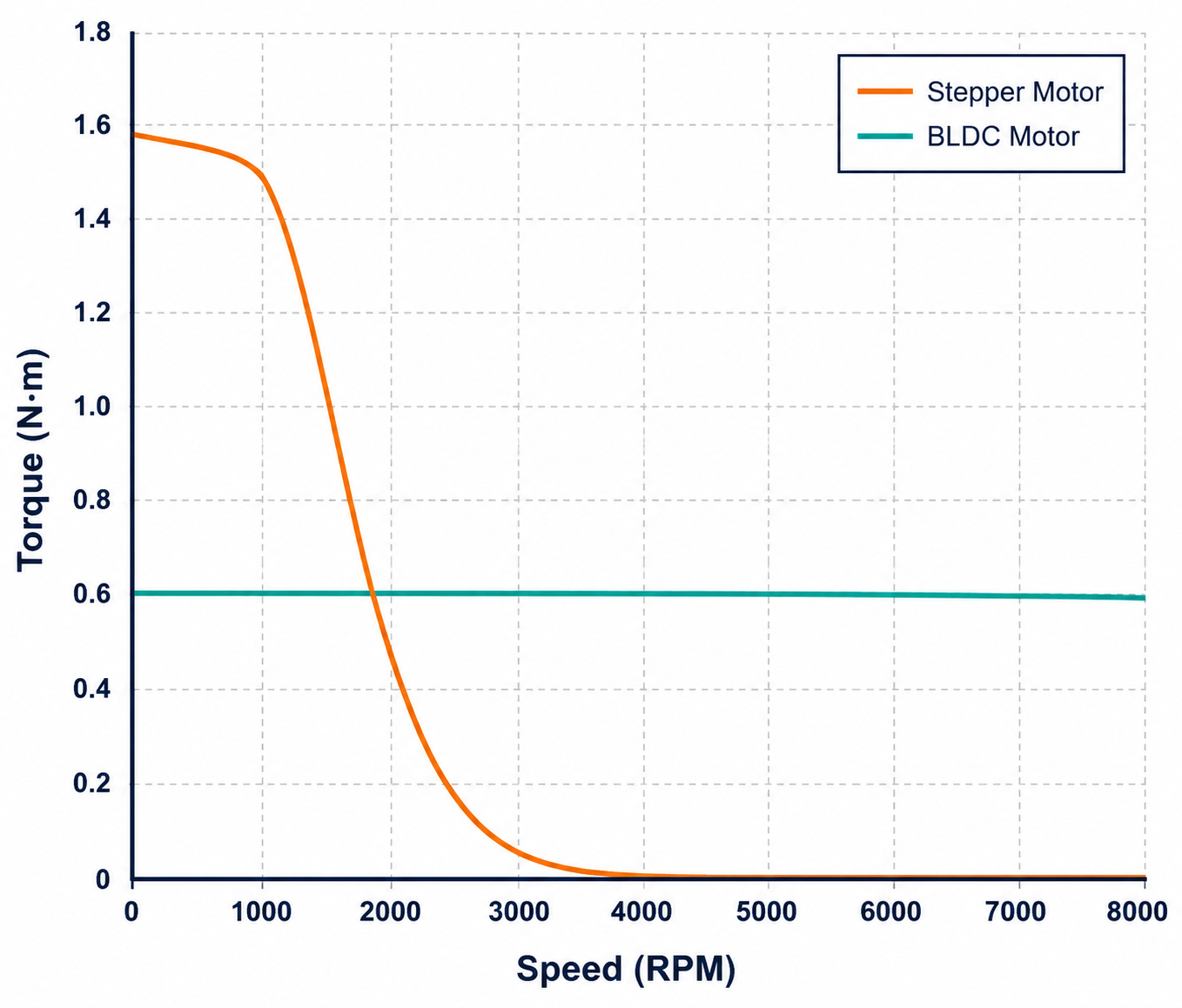
Die Drehmoment-Drehzahl-Kurve ist der Punkt, an dem die beiden Motortypen am deutlichsten auseinanderlaufen, und sie ist der wichtigste Einzelfaktor für die Anwendungszuordnung.
Schrittmotoren glänzen bei niedrigen Drehzahlen. Im Bereich 0–600 U/min liefert ein Schrittmotor kräftiges, stabiles Drehmoment, einschließlich statischem Haltemoment bei stillstehender Welle. Das ist eine native Fähigkeit: Bei vollem Strom hält der Motor seine Position gegen Last ohne zusätzlichen Bremsmechanismus. Mit steigender Drehzahl begrenzt jedoch die Wicklungsinduktivität die Stromanstiegszeit und das Ausgangsdrehmoment bricht stark ein. Die meisten industriellen Schrittmotoren verlieren den Großteil ihres nutzbaren Drehmoments oberhalb von 1.000 U/min.
BLDC-Motoren sind für dauerhaften Betrieb bei mittleren bis hohen Drehzahlen ausgelegt. Im Bereich 3.000–10.000 U/min liefert ein gut abgestimmtes BLDC-System gleichmäßiges, konstantes Drehmoment bei Wirkungsgraden von 85–92 %. Bei sehr niedrigen Drehzahlen (unter 50 U/min) können BLDC-Motoren jedoch Rastmoment und Drehmomentwelligkeit durch die Kommutierung zeigen und sind damit weniger laufruhig als Schrittmotoren bei Kriechgeschwindigkeit.
| Eigenschaft | Schrittmotor | BLDC-Motor |
|---|---|---|
| Drehmoment bei niedriger Drehzahl (0–600 U/min) | Hervorragend – starkes Haltemoment | Moderat – Rastmoment bei sehr niedrigen Drehzahlen |
| Hochgeschwindigkeit (>1.000 U/min) | Schlecht – Drehmoment bricht stark ein | Hervorragend – Nennbereich bis 10.000+ U/min |
| Statisches Haltemoment | Nativ – keine zusätzliche Hardware nötig | Erfordert separates Bremsmodul |
| Wirkungsgrad im Dauerbetrieb | ~65–70 % unter Nennbedingungen | 85–92 % typisch |
| Drehmomentwelligkeit / Laufruhe | Moderat (Mikroschritt hilft) | Niedrig – sehr ruhig im Nenndrehzahlbereich |
Open-Loop vs. Closed-Loop: Praktische Auswirkungen
Das ist der praktisch bedeutsamste architektonische Unterschied zwischen den beiden Motortypen.
Schrittmotoren laufen typischerweise im Open-Loop-Betrieb. Die Steuerung gibt Impulse aus und geht davon aus, dass der Motor exakt folgt. Unter normalen Lasten funktioniert das gut – ein richtig dimensionierter Schrittmotor hält eine Positioniergenauigkeit von ±5 % eines Vollschritts, und Fehler akkumulieren sich nicht über die Zeit. Das Problem entsteht, wenn das momentane Lastmoment das Pull-Out-Drehmoment des Motors überschreitet: Der Rotor „überspringt" (verliert Schritte) und die Steuerung hat keine Möglichkeit, das zu erkennen. Bei einem 3D-Drucker mag das einen leicht verschobenen Druck bedeuten; bei einem industriellen Dosiersystem kann es einen Dosierfehler oder Maschinenschaden verursachen. Ein Closed-Loop-Schrittmotor (mit Encoder) löst das, erhöht aber die Systemkosten.
BLDC-Motoren sind konstruktionsbedingt Closed-Loop. Hall-Sensoren liefern kontinuierliche Rotorpositionsrückmeldung, sodass der Antrieb Laständerungen in Echtzeit kompensieren kann. Wird der Motor überlastet, löst der Antrieb einen Alarm aus und stoppt das System, statt stillschweigend die Position zu verlieren. Für Anwendungen, bei denen ein unerkannter Positionierfehler zu Qualitätsmängeln, Produktschäden oder Sicherheitsvorfällen führen würde, ist diese inhärente Fehlererkennung ein bedeutender Zuverlässigkeitsvorteil.
Effizienz und Wärmeentwicklung
Es gibt eine thermische Eigenschaft von Schrittmotoren, die Ingenieure bei der Dimensionierung für 24/7-Betrieb häufig unterschätzen.
Standardmäßig liefert ein Schrittmotortreiber zu jeder Zeit den vollen Nennstrom an die Wicklungen – egal ob der Motor sich bewegt oder einfach seine letzte Befehlsposition hält. Das bedeutet, ein Schrittmotor im „Halte"-Zustand verbraucht nahezu dieselbe Leistung wie einer, der mit moderater Drehzahl läuft. In einer mehrachsigen Maschine mit mehreren Schrittmotorachsen, die zwischen den Zyklen stillstehen, summiert sich diese konstante Stromaufnahme zu messbaren Betriebskosten und erfordert sorgfältiges Thermomanagement.
BLDC-Motoren ziehen Strom proportional zur tatsächlichen mechanischen Last. Bei leichter Last oder Stillstand sinkt die Leistungsaufnahme erheblich. Über ein volles Betriebsjahr auf einer Produktionslinie kann dieser Effizienzunterschied die höheren Anschaffungskosten eines BLDC-Systems rechtfertigen. Schrittmotoren können einen „Stromreduzierungs"-Modus während des Haltens aktivieren – typischerweise Halbierung des Haltestroms – aber das halbiert auch das Haltemoment, was in Anwendungen, bei denen der Motor äußeren Kräften im Stillstand widerstehen muss, nicht akzeptabel ist.
Positioniergenauigkeit: Ein differenzierteres Bild
Die Annahme, dass „Closed-Loop immer höhere Genauigkeit bedeutet", verdient eine genauere Betrachtung.
Ein Standard-Hybrid-Schrittmotor hat eine native Schrittgenauigkeit von ±5 % eines Schrittwinkels – für einen 1,8°-Motor sind das ±0,09°, und dieser Fehler ist entscheidend: Er ist nicht kumulativ. Der Motor kann innerhalb dieses Fensters pro Schritt abweichen, driftet aber nicht allmählich über Tausende von Schritten weiter. Mit Mikroschritt lässt sich die effektive Auflösung auf 1/256 eines Schrittes steigern (51.200 Schritte pro Umdrehung bei 1,8° Basis), was eine Positionsauflösung von etwa 0,007° pro Befehl ergibt.
Die Positioniergenauigkeit eines BLDC-Motors ist direkt an seine Encoderauflösung gebunden. Ein preiswerter BLDC mit einem niedrig auflösenden Hall-Sensor-Array kann tatsächlich eine schlechtere Punkt-zu-Punkt-Positionierung bieten als ein gut abgestimmter Open-Loop-Schrittmotor. Nur ein BLDC, der als Servo konfiguriert ist (mit hochauflösendem Encoder und geschlossener Lageregelung), übertrifft einen Schrittmotor durchgängig bei der dynamischen Positioniergenauigkeit über den gesamten Drehzahlbereich. Für reine Punkt-zu-Punkt-Bewegungen – Schritt nach A, halten, Schritt nach B – ist die Schrittmotorgenauigkeit für die allermeisten Industrieautomationsaufgaben ausreichend.
Gesamtbetriebskosten
Der Motorstückpreis ist nur ein Teil der Beschaffungsgleichung. Die vollständigen Systemkosten – Treiberelektronik, Verkabelungsaufwand, Inbetriebnahmezeit und langfristiger Energieverbrauch – erzählen oft eine andere Geschichte.
| Kostenkomponente | Schrittmotor-System | BLDC-System |
|---|---|---|
| Motor (NEMA 23 äquivalent) | Niedriger (15–80 € typisch) | Höher (40–200+ €) |
| Treiber / Steuerung | Moderat (20–80 €) | Höher – Hall-Sensor-Schnittstelle nötig (50–150+ €) |
| Verkabelungsaufwand | Einfach (4-adrig bipolar oder 6-adrig) | Höher – Motorleistung + Sensorkabelbaum |
| Inbetriebnahmeaufwand | Niedrig – Impuls/Richtung-Parameter unkompliziert | Moderat – PID-Abstimmung erforderlich |
| Laufende Energiekosten | Höher – konstanter Haltestrom | Niedriger – lastproportionale Stromaufnahme |
Für OEM-Hersteller, die Maschinen mit 4–8 Bewegungsachsen bauen, spart ein Schrittmotor-basiertes System typischerweise 30–50 % der anfänglichen Systemkosten. Über einen 5-Jahres-Produktlebenszyklus bei hohen Einschaltdauern kann ein BLDC-System diese Differenz durch Energieeinsparungen wieder hereinholen – allerdings variiert diese Rechnung erheblich je nach Anwendung.
Closed-Loop-Schrittmotor: Der Mittelweg
Es lohnt sich, eine dritte Option explizit anzusprechen, die in der binären Schrittmotor-vs-BLDC-Betrachtung oft untergeht: der Closed-Loop-Schrittmotor.
Ein Closed-Loop-Schrittmotor kombiniert einen Standard-Hybrid-Schrittmotor mit einem Drehgeber. Der Antrieb überwacht die tatsächliche Wellenposition gegen die Befehlsposition und wendet eine Korrektur an, wenn eine Abweichung auftritt. Das eliminiert den Schrittverlust-Fehlermodus, während der native Langsamdrehzahl-Drehmomentvorteil und die relativ einfache Steuerungsschnittstelle erhalten bleiben. Auch das Hochgeschwindigkeits-Drehmoment verbessert sich, weil der Antrieb die Stromphase in Echtzeit optimieren kann, statt feste Open-Loop-Stromprofile zu fahren.
Für Anwendungen in der Grauzone zwischen den beiden Motortypen – variable Lasten, moderate Drehzahlen, kostenbewusste Beschaffung – liefert ein Closed-Loop-Schrittmotor häufig die beste Wertkombination. Es ist nicht für jede Anwendung die richtige Antwort, aber es ist eine, die oft übersehen wird, wenn Ingenieure die Entscheidung als striktes Schrittmotor-vs-BLDC-Dilemma betrachten.
Anwendungsbasierte Auswahlhilfe
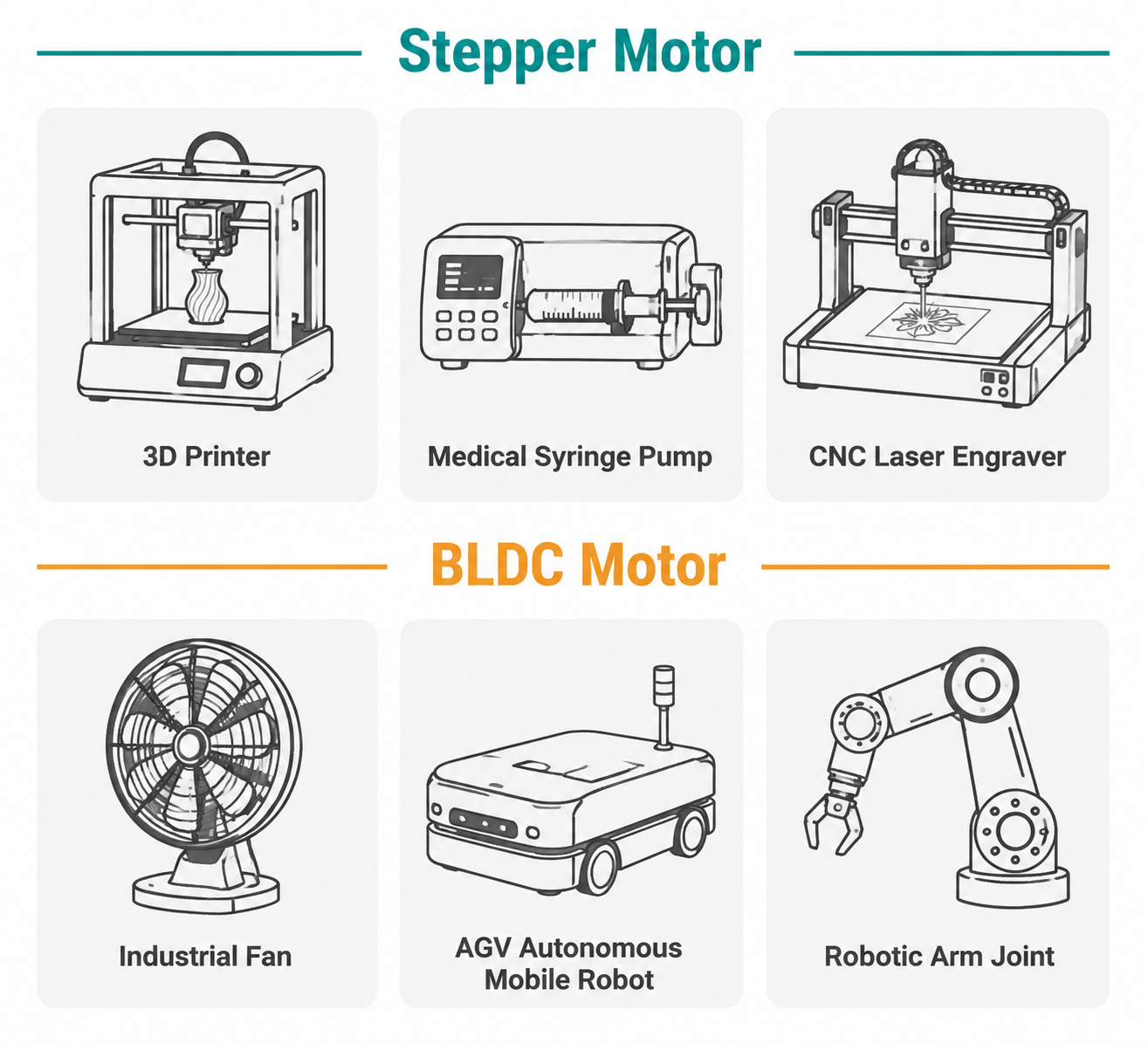
Schrittmotoren sind typischerweise die richtige Wahl für:
3D-Drucker und Lasergravierer – Präzisionspositionierung bei niedriger Drehzahl, kostensensitive Serienfertigung
Verpackungs- und Dosierautomation – intermittierende Indexierbewegung mit definierten Haltepositionen
Labor- und Medizininstrumente – Spritzenpumpen, Mikroskop-Fokusstufen, Präzisionsverstellung bei niedriger Drehzahl
Ventil- und Schieberantriebe – müssen Position unter Last mit bestromtem Motor gegen Gegendruck halten
Leichte bis mittlere CNC-Maschinen – NEMA-23-Hybrid-Schrittmotoren mit Mikroschritt-Treibern decken die meisten Fräser- und Gravierer-Achsanforderungen ab
BLDC-Motoren sind typischerweise die richtige Wahl für:
Industrielüfter und Hochgeschwindigkeitspumpen – kontinuierlicher Hochgeschwindigkeitsbetrieb, wo Effizienz direkt die Betriebskosten senkt
FTS-Antriebsräder – dynamische Lastschwankungen erfordern Closed-Loop-Schutz gegen Stillstand
Robotergelenke und kollaborative Arme – großer Drehzahlbereich mit dynamischen Drehmomentanforderungen
Elektrowerkzeuge und Elektrofahrzeuge – hohe Leistungsdichte und Effizienz sind Primäranforderungen
Medizin- und Präzisionsinstrumente mit Anspruch an ultra-ruhige Rotation – BLDC mit Sinuskommutierung übertrifft Schrittmotor bei diesen Lärm-/Vibrationspegeln
Entscheidungsrahmen
Wenn Sie einen systematischen Ansatz bevorzugen, arbeiten Sie diese sechs Fragen der Reihe nach durch:
Spitzen-Betriebsdrehzahl: Erfordert Ihre Anwendung dauerhaften Betrieb oberhalb von 1.000 U/min? Wenn ja, tendieren Sie zu BLDC.
Lastvorhersagbarkeit: Ist die mechanische Last gut definiert und gleichmäßig? Wenn ja, ist Open-Loop-Schrittmotor praktikabel. Wenn die Last unvorhersehbar schwankt, erwägen Sie Closed-Loop-Schrittmotor oder BLDC.
Haltepositionsanforderung: Muss der Motor die Position unter äußerer Last im Stillstand halten? Wenn ja, ist das native Haltemoment des Schrittmotors ein Vorteil; BLDC benötigt zusätzliche Bremshardware.
Einschaltdauer: Läuft die Maschine 24 Stunden bei hoher Drehzahl? Langfristige BLDC-Effizienzvorteile werden relevant. Intermittierende Anwendungen reduzieren diesen Faktor.
Systembudget: Sind die Anschaffungskosten die primäre Beschränkung? Schrittmotor-Systeme bieten niedrigere Einstiegskosten pro Achse. Sind Lebenszykluskosten wichtiger? Berücksichtigen Sie BLDC-Energieeinsparungen über die Betriebslebensdauer.
Fehlertoleranz: Würde ein unerkannter Positionierfehler zu Qualitätsmängeln oder Sicherheitsrisiken führen? Wenn ja, ist ein Open-Loop-Schrittmotor die falsche Wahl – bewerten Sie Closed-Loop-Schrittmotor oder BLDC.
Das Durcharbeiten dieser sechs Fragen in dieser Reihenfolge wird die meisten realen Anwendungen eindeutig einer Kategorie zuordnen. Fälle, die nach der letzten Frage uneindeutig bleiben, sind in der Regel gute Kandidaten für Closed-Loop-Schrittmotoren, die die Lücke zwischen den beiden Architekturen schließen.
Häufig gestellte Fragen
Kann ein Schrittmotor einen BLDC-Motor in einer Hochgeschwindigkeits-Spindelanwendung ersetzen?
In der Regel nicht. Eine Hochgeschwindigkeitsspindel, die kontinuierlich mit 3.000+ U/min läuft, ist genau die Anwendung, bei der das Schrittmotor-Drehmoment bereits auf nahezu null eingebrochen ist. BLDC- oder AC-Induktionsmotoren sind die angemessene Technologie für Spindelantriebe oberhalb von 1.500 U/min.
Ist ein BLDC-Motor immer genauer als ein Schrittmotor?
Nicht unbedingt. Ein BLDC-Motor mit einfacher Hall-Sensor-Rückführung kann eine niedrigere Punkt-zu-Punkt-Positionierauflösung haben als ein richtig mikrogeschrittener Hybrid-Schrittmotor. Nur ein als Servo konfigurierter BLDC (mit hochauflösendem Encoder und geschlossener Lageregelung) liefert durchgängig höhere dynamische Genauigkeit.
Warum wird mein Schrittmotor heiß, selbst wenn er sich nicht bewegt?
Schrittmotortreiber halten den Haltestrom durch die Wicklungen aufrecht, wann immer der Motor bestromt ist – unabhängig davon, ob er sich bewegt. Dieser konstante Strom ist die primäre Wärmequelle in stillstehenden Schrittmotorsystemen. Die Aktivierung der Stromreduzierungsfunktion des Treibers während des Haltens reduziert die Wärmeentwicklung, aber auf Kosten eines reduzierten Haltemoments.
Ist ein Closed-Loop-Schrittmotor dasselbe wie ein Servomotor?
Funktional ähnlich, da beide Encoder-Rückführung zur Positionskorrektur verwenden, aber mechanisch unterschiedlich. Ein Closed-Loop-Schrittmotor behält den Mehrpol-Rotor und das starke Langsam-Haltemoment des Schrittmotors; ein traditioneller Servo verwendet einen BLDC- oder Bürsten-DC-Motor mit einer weicheren Drehmomentkurve, die für kontinuierliche dynamische Bewegung optimiert ist. Closed-Loop-Schrittmotoren sind typischerweise kostengünstiger, haben aber einen engeren Hochgeschwindigkeitsbereich als Servosysteme.
Bereit, den richtigen Motor für Ihre Anwendung auszuwählen?
HDB Motors fertigt Hybrid-Schrittmotoren in den NEMA-Baugrößen 17, 23 und 34 mit Standard- und kundenspezifischen Wicklungsoptionen für ein breites Spektrum an Automatisierungsanwendungen. Wenn Sie den obigen Auswahlrahmen durchgearbeitet und Schrittmotoren als passende Lösung identifiziert haben, kann unser Engineering-Team Ihnen helfen, das richtige Drehmoment, die richtige Stromstärke und die passende Treiberkombination für Ihr spezifisches Lastprofil zu bestätigen.
| Standard-Lieferzeit | 7–15 Tage für lagerhaltige NEMA 23 und NEMA 34 Hybrid-Schrittmotoren |
| Kundenspezifische Wicklung | Verfügbar für OEM-Serienbestellungen mit spezifischen Spannungs- oder Induktivitätsanforderungen |
| Musterrichtlinie | Engineering-Muster verfügbar für qualifizierte OEM-Evaluierungsprojekte |