
Wenn ein Ingenieur einen Schrittmotor für eine CNC-Achse oder eine medizinische Dosierpumpe dimensioniert, ist der Schrittwinkel selten der erste Parameter, den er sich ansieht – und genau da fangen die Positionierfehler meist an. Die Annahme „kleinerer Schrittwinkel gleich bessere Genauigkeit" wird oft genug wiederholt, dass sie Beschaffungsentscheidungen prägt. Aber der Zusammenhang zwischen Schrittwinkel, mechanischer Auflösung und tatsächlicher Positionierleistung ist komplexer, als diese Faustformel vermuten lässt.
Dieser Artikel gehört zu einer technischen Artikelreihe. Die zentrale Übersicht finden Sie in der Schrittmotor Grundlagen: Typen, Auswahl & OEM. Ergänzend dazu Wie funktioniert ein Schrittmotor?, das Schrittmotor Funktionsprinzip, der Schrittmotor Typen Vergleich und der direkte Vergleich Hybrid vs Permanentmagnet Schrittmotor.
Wir arbeiten uns hier durch die physikalischen Grundlagen des Schrittwinkels, die echten konstruktiven Unterschiede zwischen 1,8°- und 0,9°-Motoren und was Mikroschritt tatsächlich liefert – im Unterschied zu dem, was das Treiberdatenblatt suggeriert.
Wo der Schrittwinkel herkommt
Ein standardmäßiger zweiphasiger Hybrid-Schrittmotor erzeugt Bewegung, indem er die Statorwicklungen sequenziell bestromt. Das zieht die Permanentmagnet-Zähne des Rotors nacheinander in Ausrichtung mit den Statorpolen. Der Schrittwinkel ergibt sich direkt aus der Anzahl der Rotorzähne und der Statorphasen:
Schrittwinkel = 360° / (Anzahl Rotorzähne × Anzahl Phasen × 2)
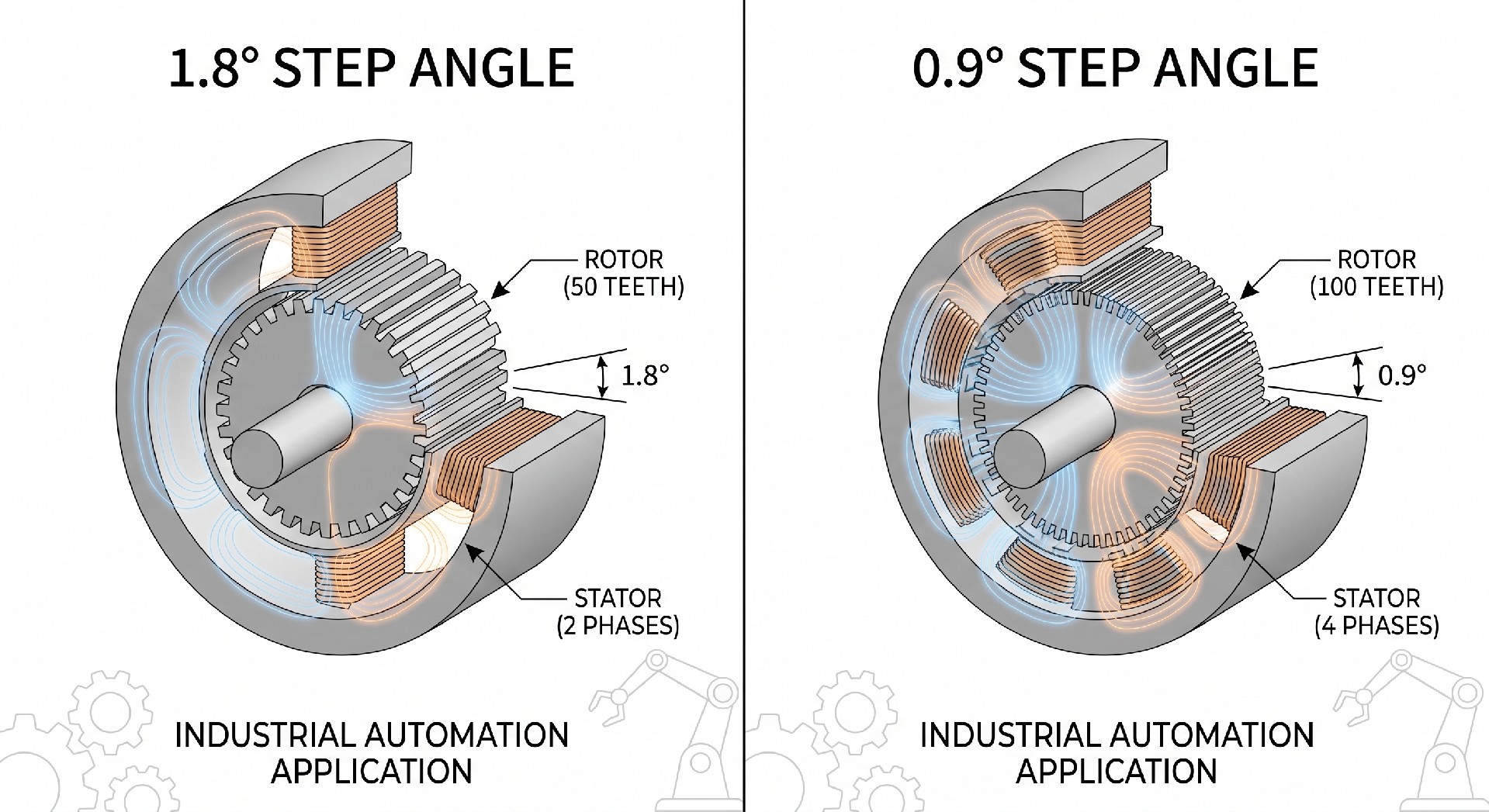
Beim üblichen 1,8°-Motor hat der Rotor 50 Zähne. Mit zwei Phasen und der Standard-Vollschritt-Ansteuerung ergeben sich 200 Schritte pro Umdrehung. Ein 0,9°-Motor arbeitet mit einem 100-zähnigen Rotor – doppelte Schrittzahl, 400 pro Umdrehung. Die Statorgeometrie ändert sich entsprechend: Die Polteilung wird enger, was Auswirkungen auf die Wicklungsinduktivität, die EMK-Charakteristik und letztlich auf das Verhalten bei höheren Drehzahlen hat.
Das sollte man auf Konstruktionsebene verstanden haben, denn es erklärt, warum man einen 0,9°-Motor nicht einfach als „besseren" 1,8°-Motor behandeln kann. Es sind unterschiedliche mechanische Auslegungen mit unterschiedlichen elektromagnetischen Eigenschaften – kein reines Auflösungs-Upgrade.
1,8° gegen 0,9°: Die technischen Zielkonflikte
Der 1,8°-Motor ist aus praktischen Gründen zum Industriestandard geworden. Die 50-Zahn-Rotorgeometrie erzeugt ein relativ kräftiges Rastmoment und eine klar definierte magnetische Ausrichtung bei jedem Vollschritt. Das macht den Motor tolerant gegenüber moderaten Laststörungen und gibt ihm ein vorhersagbares Verhalten über einen breiten Drehzahlbereich. Für die meisten CNC-Achsanwendungen – besonders dort, wo die mechanische Übertragung eine Gewindespindel mit vernünftiger Steigung enthält – liefern 200 Schritte pro Umdrehung eine ausreichende Open-Loop-Auflösung, ohne dem Treiber etwas Ungewöhnliches abzuverlangen.
Der 100-zähnige Rotor des 0,9°-Motors erzeugt eine feinere magnetische Teilung, was die Drehmomentwelligkeit pro Schritt reduziert. In Anwendungen, wo sich Drehmomentwelligkeit direkt in Geschwindigkeitsschwankungen übersetzt – medizinische Peristaltikpumpen, Präzisionsdosiersysteme, optische Positioniertische – ist das relevant. Das gleichmäßigere Drehmomentprofil bei niedrigen Drehzahlen ist der Hauptgrund, einen 0,9°-Motor zu spezifizieren, nicht die Schrittanzahl an sich.
Der Zielkonflikt: Die engere Polteilung erhöht die Wicklungsinduktivität im Verhältnis zum Widerstand. Bei höheren Schrittfrequenzen wird die Stromanstiegszeit zum limitierenden Faktor. Ein 0,9°-Motor, der mit derselben Drehzahl läuft wie ein 1,8°-Motor, führt doppelt so viele Schritte pro Sekunde aus – die Stromregelung des Treibers arbeitet also doppelt so hart. Der Drehmomentabfall über der Drehzahl ist steiler, und der Motor reagiert empfindlicher auf die Versorgungsspannung. In der Praxis sind 0,9°-Motoren vor allem bei niedrigen bis mittleren Drehzahlen sinnvoll, wo das ruhigere Drehmomentprofil die reduzierte Hochgeschwindigkeitsleistung rechtfertigt.
| Parameter | 1,8° Motor (200 Schritte/U) | 0,9° Motor (400 Schritte/U) |
|---|---|---|
| Rotorzähne | 50 | 100 |
| Schritte pro Umdrehung | 200 | 400 |
| Drehmomentwelligkeit (Vollschritt) | Höher | Niedriger |
| Drehmoment bei hoher Drehzahl | Besser | Durch Induktivität reduziert |
| Resonanzempfindlichkeit | Moderat | Niedrigere Grundwelle, aber verschobene Harmonische |
| Typischer Anwendungsbereich | CNC-Achsen, allgemeine Automation | Medizinpumpen, Optiktische, Langsam-Präzision |
Resonanz und Schrittwinkel
Jeder Schrittmotor hat eine Eigenresonanzfrequenz, bestimmt durch die Rotorträgheit und die magnetische Federsteifigkeit an einer Rastposition. Bei einem unbelasteten 1,8°-Motor liegt diese meist irgendwo zwischen 100 und 200 Hz – das entspricht etwa 30–60 U/min im Vollschrittbetrieb. Fährt man ohne Dämpfung durch diesen Bereich, bekommt man Geschwindigkeitswelligkeit, hörbare Geräusche und in schweren Fällen Schrittverluste.
Der 0,9°-Motor verschiebt diesen Resonanzpunkt. Die höhere Zahnanzahl ändert die magnetische Steifigkeit, und die verdoppelte Schrittfrequenz bedeutet, dass der Motor sein Resonanzband bei einer anderen Wellendrehzahl durchläuft. Das kann ein Vorteil oder ein Nachteil sein, je nach Betriebsdrehzahl der Anwendung. Liegt die erforderliche Dauerlauf-Drehzahl zufällig genau im Resonanzbereich des 1,8°-Motors, kann der Wechsel auf 0,9° das Problem lösen, ohne Mikroschritt oder mechanische Dämpfung zu benötigen. Fällt die Resonanz des 0,9°-Motors aber in einen kritischeren Teil des Drehzahlbereichs, verschiebt sich das Problem nur, statt zu verschwinden.
Die Lastträgheit spielt direkt mit hinein. Eine hohe Lastträgheit – schweres Portal, großer Rundtisch – senkt die Resonanzfrequenz und verbreitert das Resonanzband. Eine niedrige Lastträgheit hebt sie an. Deshalb sind Resonanzbeobachtungen auf dem Prüfstand ohne reale Last oft irreführend. Was zählt, ist die Systemresonanz aus Motor und Last, und die muss mit der tatsächlich reflektierten Trägheit im Antriebsstrang bewertet werden.
Mikroschritt: Was der Treiber tut und was der Motor liefert
Mikroschritt funktioniert, indem der Strom zwischen den zwei Phasen nach einem Sinus-Cosinus-Verhältnis aufgeteilt wird, statt die Phasen hart ein- und auszuschalten. Statt zwischen Vollschritt-Positionen zu springen, wird der Rotor an Zwischenpositionen gehalten – durch die vektorielle Summe der beiden Phasenströme. Ein auf 16× Mikroschritt konfigurierter Treiber teilt jeden 1,8°-Vollschritt in 16 Teilschritte zu je 0,1125° auf, was 3200 Schritte pro Umdrehung ergibt.
Die von dieser Schrittzahl implizierte Positionierauflösung ist insofern real, als der Treiber 3200 unterschiedliche Stromzustände pro Umdrehung ausgibt. Ob der Rotor tatsächlich 3200 unterschiedliche mechanische Positionen erreicht, ist eine andere Frage. Die Antwort hängt von der magnetischen Linearität des Motors, den Fertigungstoleranzen und den Lastbedingungen ab.
Das grundlegende Problem: Die Drehmoment-Weg-Kurve eines Schrittmotors ist sinusförmig, nicht linear. An einer Vollschritt-Position sitzt der Motor im Maximum seiner Haltemomentkurve – ein stabiles Gleichgewicht. An einer Mikroschritt-Position zwischen zwei Vollschritten ist das Haltemoment reduziert. Am Mittelpunkt zwischen zwei Vollschritten (dem 8. Mikroschritt bei 16×) sinkt das Haltemoment auf etwa 70 % des Vollschrittwerts. Jedes Lastmoment, jede Reibung oder Störkraft, die das verfügbare Haltemoment an dieser Mikroschrittposition übersteigt, lässt den Rotor zur nächstgelegenen stabilen Position rutschen – in der Regel eine Vollschritt-Lage.
In der Praxis bringt Mikroschritt unterhalb von 1/8 Schritt abnehmende Erträge bei der mechanischen Positioniergenauigkeit. Der Hauptnutzen hoher Mikroschritt-Verhältnisse – 1/16, 1/32, 1/64 – ist ruhigerer Lauf und reduziertes hörbares Geräusch, nicht verbesserte Positioniergenauigkeit.
| Mikroschritt-Einstellung | Schritte/U (1,8° Motor) | Theoretische Auflösung | Praktische Positionsgenauigkeit | Hauptnutzen |
|---|---|---|---|---|
| Vollschritt | 200 | 1,8° | ±0,09° (typisch) | Maximales Drehmoment, einfachster Treiber |
| Halbschritt | 400 | 0,9° | ±0,05° | Reduzierte Resonanz, moderate Laufruhe |
| 1/8 Schritt | 1600 | 0,225° | ±0,05° (lastabhängig) | Ruhiger Lauf, Geräuschreduzierung |
| 1/16 Schritt | 3200 | 0,1125° | ±0,05° (keine Verbesserung) | Gleichmäßigeres Geschwindigkeitsprofil |
| 1/32 Schritt oder feiner | 6400+ | <0,06° | Keine messbare Verbesserung | Nur Geräuschreduzierung |
Der in der Tabelle mehrfach auftauchende Wert ±0,05° spiegelt die inhärente mechanische Genauigkeit des Motors wider – die Toleranz der Rotorzahngeometrie, der Statorpolausrichtung und des Lagerspiels. Das ist eine Fertigungsspezifikation, keine Funktion der Schrittauflösung. Kein noch so hoher Mikroschritt kann daran etwas verbessern. Wer eine Positioniergenauigkeit braucht, die über das hinausgeht, was die mechanische Toleranz des Motors hergibt, braucht eine Closed-Loop-Rückführung – keine höhere Mikroschrittstufe.
Systemauflösung: Vom Motor zur Last
Der Schrittwinkel an der Motorwelle ist nur der Ausgangspunkt. Was in der Anwendung zählt, ist die Auflösung an der Last – der lineare Vorschub pro Schritt bei einer Gewindespindel oder das Winkelinkrement pro Schritt bei einem Rundtisch.
Ein 1,8°-Motor, der eine 5-mm-Spindel direkt antreibt, liefert 5 mm / 200 Schritte = 0,025 mm pro Vollschritt. Mit 1/8 Mikroschritt werden daraus 0,003125 mm pro Mikroschritt – beeindruckend, bis man das Spindelumkehrspiel berücksichtigt, das bei einer typischen gerollten Kugelgewindespindel 0,01–0,05 mm beträgt. Die Mikroschritt-Auflösung ist kleiner als das mechanische Spiel und damit für die tatsächliche Positioniergenauigkeit irrelevant.
Das ist ein häufiger Konstruktionsfehler in CNC- und Automationssystemen: hohe Mikroschrittverhältnisse zu spezifizieren, um auf dem Papier eine Auflösungszahl zu erreichen, während die mechanische Übertragung die reale Genauigkeit auf einen viel gröberen Wert begrenzt. Der richtige Ansatz: Die Schrittauflösung an die mechanische Genauigkeit der Übertragung anpassen und Mikroschritt nur so weit nutzen, wie es für ruhigen Lauf nötig ist.
Anwendungsspezifische Auswahl
Für die Achssteuerung von CNC-Fräsen und -Portalen deckt der 1,8°-Motor mit 1/8 oder 1/16 Mikroschritt die meisten Anforderungen ab. Die mechanische Übertragung – Spindelsteigung, Riemenuntersetzung – begrenzt die Positioniergenauigkeit ohnehin auf 0,01–0,05 mm, was ein 200-Schritt-Motor problemlos auflösen kann. Im Vordergrund steht die Drehmomentkonstanz über den Betriebsdrehzahlbereich – hier ist die 1,8°-Ausführung im Vorteil.
Beim 3D-Druck läuft das Bewegungssystem mit relativ niedrigen Geschwindigkeiten und leichten Lasten. Drehmomentwelligkeit schlägt sich als Oberflächenartefakt nieder – die Streifenbildung an gedruckten Wänden bei bestimmten Schichthöhen korreliert mit der Schrittrate, die mit der Rahmenresonanz wechselwirkt. Hier reduzieren sowohl 0,9°-Motoren als auch 1/16 Mikroschritt auf 1,8°-Motoren diesen Effekt; die Wahl hängt oft von Treiberverfügbarkeit und Kosten ab.
Medizinische Peristaltik- und Spritzenpumpen sind der Bereich, wo 0,9°-Motoren ihren Platz haben. Die Fördergenauigkeit hängt von der Geschwindigkeitsgleichförmigkeit ab, und das ruhigere Drehmomentprofil des 0,9°-Motors bei niedrigen Drehzahlen reduziert die Pulsation. Diese Systeme laufen meist mit festen, niedrigen Drehzahlen, wo das reduzierte Hochgeschwindigkeits-Drehmoment des 0,9°-Motors keine Einschränkung darstellt.
Verpackungs-Indexiersysteme setzen andere Prioritäten. Das Bewegungsprofil ist typischerweise schnelles Indexieren mit anschließendem Stillstand – hohe Beschleunigung, moderate Geschwindigkeit, harter Stopp. Drehmoment bei Drehzahl ist hier wichtiger als Langsam-Laufruhe. Das bessere Hochgeschwindigkeits-Drehmoment des 1,8°-Motors und sein kräftigeres Rastmoment im Stillstand (das die Position während der Haltephase ohne Dauerstrom stützt) machen ihn hier zur Standardwahl.
| Anwendung | Empfohlener Schrittwinkel | Mikroschritt | Bestimmender Faktor |
|---|---|---|---|
| CNC-Achse (Kugelgewindespindel) | 1,8° | 1/8 bis 1/16 | Drehmoment bei Drehzahl, Getriebegenauigkeit |
| 3D-Drucker (kartesisch/CoreXY) | 0,9° oder 1,8° | 1/16 bis 1/32 | Oberflächengüte, Resonanzartefakte |
| Medizinpumpe (peristaltisch) | 0,9° | 1/8 | Geschwindigkeitskonstanz, Drehmomentwelligkeit |
| Verpackungs-Indexierer | 1,8° | Voll- oder Halbschritt | Beschleunigungsmoment, Halteposition |
| Optischer Positioniertisch | 0,9° | 1/8 bis 1/16 | Langsamlaufruhe, Wiederholbarkeit |
Praxis: Treiber und Motor aufeinander abstimmen
Die Wahl des Schrittwinkels existiert nicht isoliert vom Treiber. Ein 0,9°-Motor, der mit 1/16 Mikroschritt an einem Treiber mit 24-V-Versorgung läuft, hat eine völlig andere Drehmoment-Drehzahl-Kurve als derselbe Motor an 48 V. Die höhere Spannung ermöglicht einen schnelleren Stromanstieg in den Wicklungen, was den Induktivitätsnachteil des 100-zähnigen Rotors bei höheren Schrittfrequenzen teilweise kompensiert. Wenn eine Anwendung von einem 0,9°-Motor moderate Drehzahlen verlangt, muss die Versorgungsspannung entsprechend dimensioniert sein – typischerweise das 20- bis 25-Fache der Motornennspannung als vernünftiger Ausgangspunkt für die Treiberversorgung.
Auch die Stromeinstellung interagiert mit dem Schrittwinkelverhalten. Einen Motor mit reduziertem Strom zu fahren, um die Wärmeentwicklung zu begrenzen, senkt das Haltemoment an jeder Mikroschrittposition – das macht das System anfälliger für lastbedingte Positionsfehler. In Systemen, wo thermische Randbedingungen zu niedrigeren Stromeinstellungen zwingen, bietet das kräftigere Vollschritt-Rastmoment des 1,8°-Motors mehr Reserve als der 0,9°-Motor bei gleichem reduziertem Strom.
Die Entscheidung zwischen 1,8° und 0,9° sowie die Wahl des Mikroschrittverhältnisses sollte von den tatsächlichen Bewegungsanforderungen abgeleitet werden: der geforderten Auflösung an der Last, dem Betriebsdrehzahlbereich, dem Lastmoment und der -trägheit sowie der akzeptablen Geschwindigkeitswelligkeit. Von diesen Randbedingungen rückwärts zur Motor- und Treiberspezifikation zu arbeiten, ergibt ein zuverlässigeres System, als von einem Auflösungsziel auf dem Motordatenblatt vorwärts zu konstruieren.
Häufig gestellte Fragen
Bedeutet ein kleinerer Schrittwinkel immer bessere Positioniergenauigkeit?
In der Praxis nicht. Der Schrittwinkel bestimmt die Auflösung, die der Motor theoretisch an der Welle erreichen kann. Was die tatsächliche Positioniergenauigkeit begrenzt, ist das mechanische System – Spindelumkehrspiel, Riemendehnung, Lagerluft und die Zahngeometrietoleranz des Motors selbst. Ein 0,9°-Motor in einem Antriebsstrang mit 0,05 mm Spiel positioniert nicht genauer als ein 1,8°-Motor im gleichen Antriebsstrang. Wenn Wellengenauigkeit die Anforderung ist, ist die mechanische Toleranzangabe des Motors (typisch ±0,09° für einen 1,8°-Motor, nicht kumulativ) die relevante Zahl, nicht der Schrittwinkel.
Kann ich hohen Mikroschritt als Ersatz für ein Closed-Loop-System nutzen?
Nein. Mikroschritt steuert den Stromvektor, nicht die Rotorposition. Übersteigt das Lastmoment an einer Mikroschrittposition das dort verfügbare Haltemoment – das gegenüber einer Vollschrittposition reduziert ist –, rutscht der Rotor, ohne dass die Steuerung davon weiß. Open-Loop-Schrittmotorsysteme haben per Definition keine Positionsrückmeldung. Hohe Mikroschrittverhältnisse reduzieren Geschwindigkeitswelligkeit und Lärm, liefern aber keine Positionsüberprüfung. Anwendungen, die keine Schrittverluste oder Positionsdrift unter variabler Last tolerieren können, brauchen einen Encoder und Closed-Loop-Regelung – unabhängig vom Mikroschrittverhältnis.
Warum vibriert mein Schrittmotor bei bestimmten Drehzahlen stark und läuft bei anderen ruhig?
Das ist Resonanz. Das Motor-Last-System hat eine Eigenfrequenz, bestimmt durch Rotorträgheit, Lastträgheit und magnetische Federsteifigkeit. Wenn die Schrittrate dieser Frequenz entspricht oder nahekommt, schwingt der Rotor, statt sauber zu schritten. Die Abhilfe hängt davon ab, wo die Resonanz relativ zur geforderten Betriebsdrehzahl liegt. Optionen: auf ein höheres Mikroschrittverhältnis wechseln, um schneller durch das Resonanzband zu fahren; einen mechanischen Dämpfer hinzufügen; die Beschleunigungsrampe so anpassen, dass die Resonanzdrehzahl nicht im Dauerlauf liegt; oder – bei fester Betriebsdrehzahl – einen Motor mit anderer Rotorträgheit wählen, der die Resonanz aus dem Problembereich verschiebt.
Was ist der praktische Unterschied zwischen 1/16 und 1/32 Mikroschritt?
Bei 1/16 Mikroschritt an einem 1,8°-Motor beträgt die theoretische Schrittgröße 0,1125°. Bei 1/32 sind es 0,05625°. Mechanisch ist keiner dieser Werte unter realen Lastbedingungen als wiederholbares Positionierinkrement erreichbar – die magnetische Nichtlinearität und die Fertigungstoleranzen des Motors dominieren in diesem Größenbereich. Der hörbare Unterschied zwischen 1/16 und 1/32 ist in den meisten Systemen ebenfalls minimal. 1/32 oder feiner zu spezifizieren, ist selten technisch zu rechtfertigen; es spiegelt meist ein Missverständnis dessen wider, was Mikroschritt mechanisch tatsächlich liefert.
Ist ein 0,9°-Motor ein direkter Ersatz für einen 1,8°-Motor?
Elektrisch teilen viele 0,9°-Motoren Baugröße und Steckerbelegung mit ihren 1,8°-Gegenstücken – der mechanische Einbau ist also meist unkompliziert. Die Treiberkonfiguration muss angepasst werden: Die Impulszahl pro Umdrehung verdoppelt sich, Bewegungsprofile müssen neu berechnet werden. Wichtiger: Die Drehmoment-Drehzahl-Kurve ist anders. Wenn das bestehende System beim 1,8°-Motor mit Reserve dimensioniert war, kann der 0,9°-Motor wegen seiner höheren Induktivität am oberen Ende des Drehzahlbereichs unterperformen. Vor dem Austausch den Drehmomentbedarf bei maximaler Betriebsdrehzahl anhand der 0,9°-Kurve prüfen.
Wie wirkt sich die Lastträgheit auf die Schrittwinkelwahl aus?
Hohe Lastträgheit im Verhältnis zur Rotorträgheit erschwert die Beschleunigung und begünstigt Überschwingen bei jedem Schritt. Im Vollschrittbetrieb kann dieses Überschwingen den Rotor um die Zielposition pendeln lassen, bevor er einschwingt – ein Verhalten, das sich in der Nähe der Resonanz verstärkt. Mikroschritt reduziert den Winkelimpuls pro Schritt, was diese Schwingung dämpft. Als grobe Richtschnur gilt: Trägheitsverhältnisse über 10:1 (Last zu Rotor) erfordern eine sorgfältige Bewertung von Schrittrate und Mikroschritteinstellung und können darauf hindeuten, dass ein Getriebe oder ein größerer Motorrahmen die bessere Lösung ist als ein höheres Mikroschrittverhältnis.
Ab wann sollte ich von einem Schrittmotor auf einen Servomotor für eine Präzisionsachse wechseln?
Der Umschlagpunkt hängt von drei Faktoren ab: Drehzahl, Lastvariabilität und Genauigkeitsanforderung. Schrittmotoren funktionieren gut bei niedrigen bis mittleren Drehzahlen mit vorhersagbaren Lasten und Positioniertoleranzen oberhalb etwa 0,01 mm an der Last. Wenn die Anwendung hohe Drehzahlen mit anhaltendem Drehmoment, variable Lasten mit Risiko von Schrittverlusten oder Wiederholgenauigkeiten unter 0,01 mm mit Verifikation erfordert, ist ein Servomotor mit Encoder-Rückführung die richtige Wahl. Der Kostenunterschied hat sich mit kompakten Closed-Loop-Schrittmotorsystemen deutlich verringert – sie ergänzen einen Standardschrittmotor um Encoder und Lagekorrektur und bieten einen praktischen Mittelweg für Anwendungen, die Positionsverifikation ohne volle Servokomplexität brauchen.