
Schrittmotoren liefern präzise, inkrementelle Drehbewegungen in industriellen Automatisierungssystemen, indem sie digitale Impulse ohne Rückführungssensoren in exakte Wellenpositionen umwandeln. Konstrukteure und OEM-Fabriken setzen sie für die Open-Loop-Steuerung in CNC-Maschinen, Robotern und Verpackungsanlagen ein, wo Positionsgenauigkeiten bis zu 0,9°-Schritten entscheidend sind.
Anders als kontinuierliche DC-Motoren halten Schrittmotoren ihre Position selbst bei unbestromten Bauformen gegen Lastmomente und sind damit ideal für Anwendungen mit hohen Haltemomenten in der Motion Control. HDBMotor bietet NEMA-Hybrid-Schrittmotoren, die für die Märkte USA, Deutschland, Europa und Südkorea optimiert sind und Kosten, Drehmoment und Zuverlässigkeit für Industrieintegratoren ausbalancieren.
Diese Pillar Page behandelt Schrittmotor Grundlagen, Typen, Leistungskurven, Auswahlkriterien und OEM-Beschaffungsstrategien, um Einkaufsmanager beim Aufbau robuster Automatisierungssysteme zu unterstützen.
Wie funktioniert ein Schrittmotor?
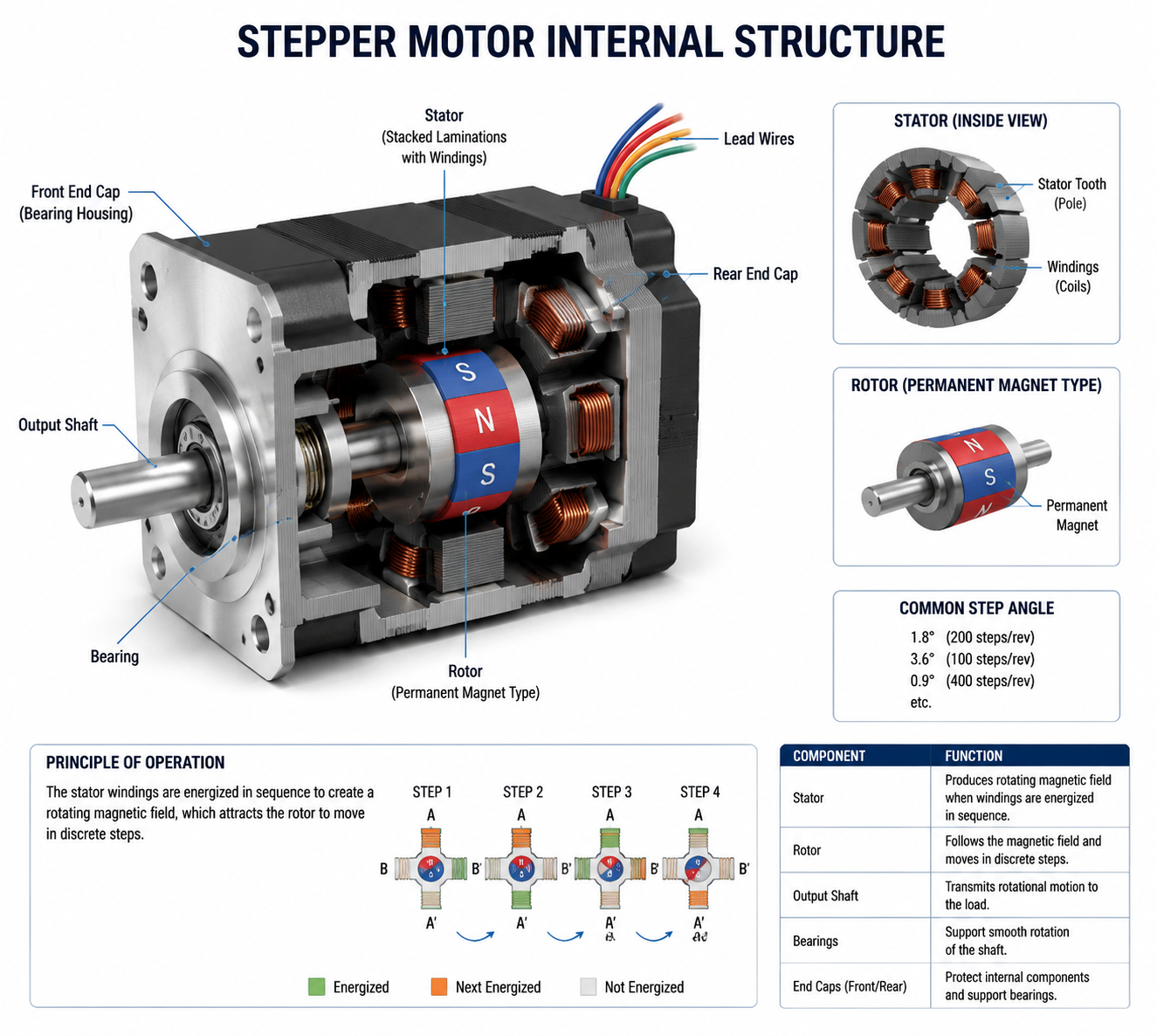
Schrittmotoren arbeiten, indem sie die Statorspulen nacheinander bestromen und so rotierende Magnetfelder erzeugen, die den Rotor in diskreten Schritten ausrichten. Jeder elektrische Impuls bewegt die Welle um einen festen Winkel, typischerweise 1,8° bei 200 Schritten pro Umdrehung, und ermöglicht so eine digitale Positionssteuerung ohne Encoder.
Der Stator besitzt mehrere Polpaare mit Wicklungen, während der Rotor – als Permanentmagnet-, Reluktanz- oder Hybridausführung – durch elektromagnetische Anziehung in Position gehalten wird. Treiber interpretieren Schritt-/Richtungssignale, um den Strom sequenziell durch die Phasen zu leiten und je nach Steuermodus sanfte oder mikroschrittbasierte Bewegungen zu erzeugen.
Das Arbeitsprinzip des Schrittmotors
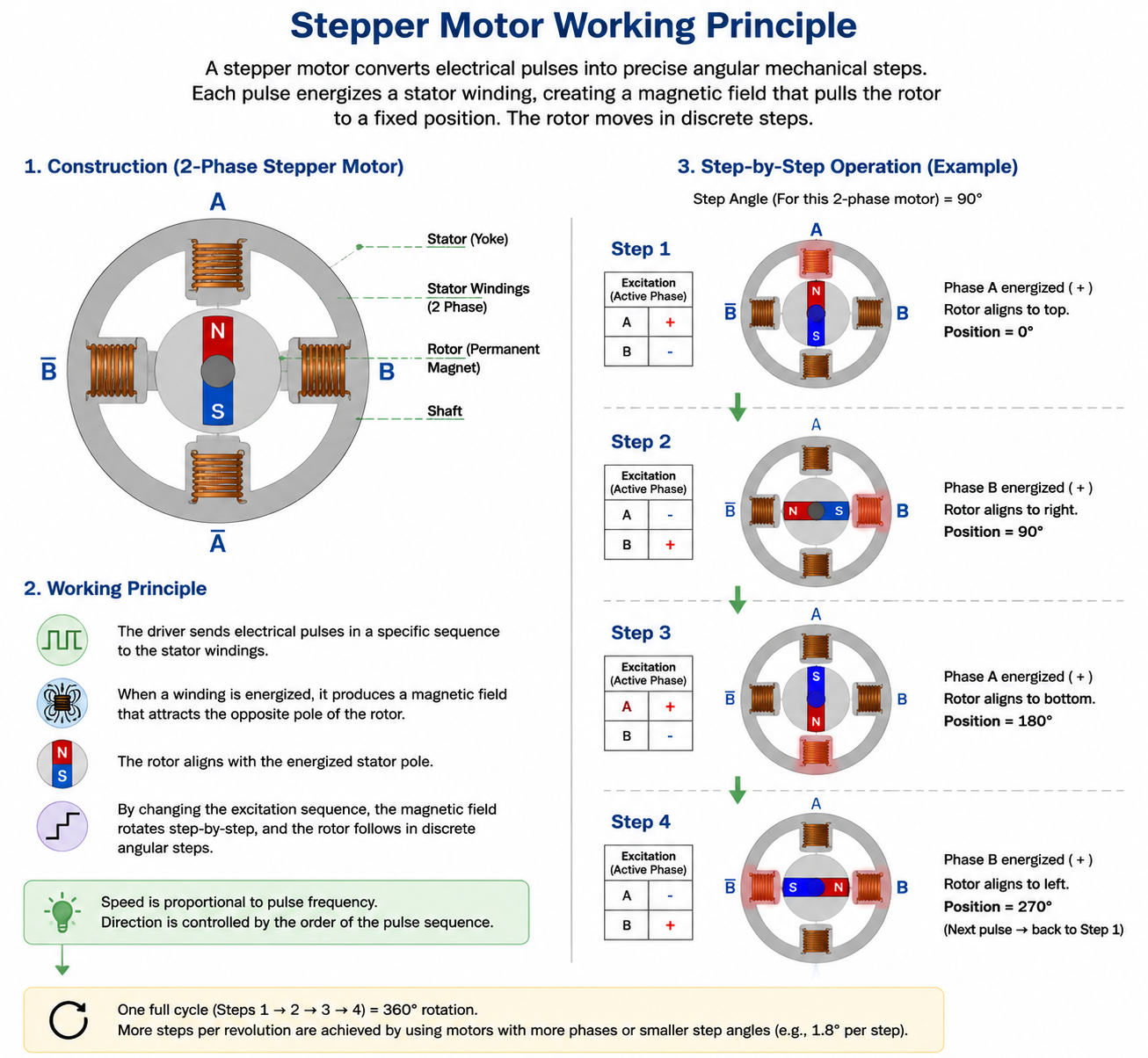
Im Kern beruht das Prinzip auf elektromagnetischer Ausrichtung: Der Strom in den Statorspulen erzeugt ein Magnetfeld, und der Rotor richtet seine Pole oder Zähne so aus, dass der magnetische Widerstand minimiert wird. Die sequenzielle Phasenbestromung – Vollschritt, Halbschritt oder Mikroschritt – dreht das Feld und zieht den Rotor schrittweise mit.
Bei bipolaren Hybriden kehren H-Brücken-Treiber die Strompolarität pro Spule für bidirektionale Felder um und nutzen so das Drehmoment aller Wicklungen maximal aus. Die Impulsfrequenz bestimmt die Drehzahl, während der Strom das Drehmoment begrenzt; Resonanzen treten bei 50-150 Hz ohne Dämpfung auf.
Für das Featured Snippet: Schrittmotoren wandeln elektrische Impulse durch sequenzielle Statorbestromung in präzise mechanische Schritte um, wobei das rotierende Magnetfeld den Rotor ausrichtet.
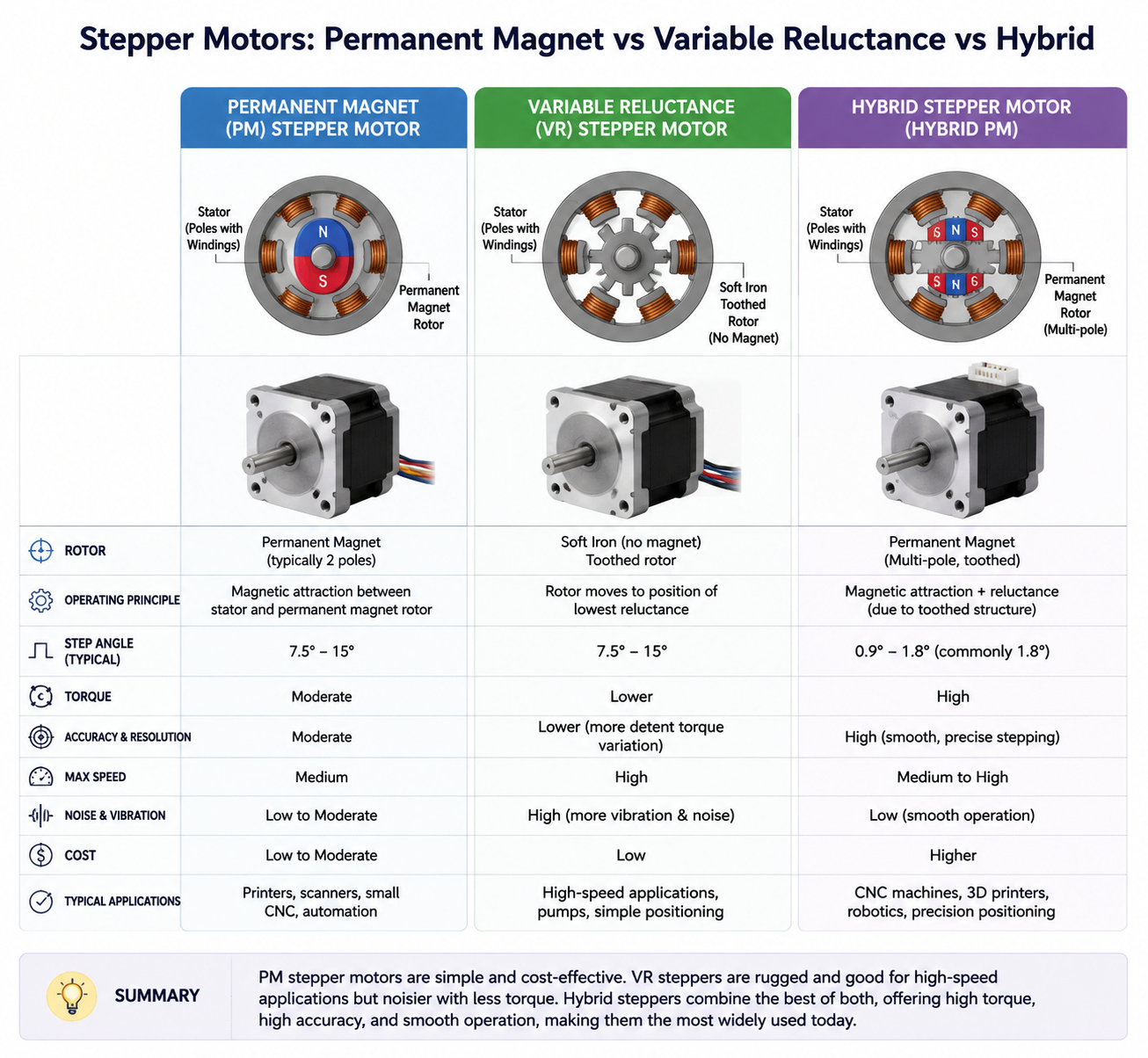
Permanentmagnet-Schrittmotor
Permanentmagnet-Schrittmotoren (PM) verwenden axiale Magnete im Rotor für ein Rastmoment und eignen sich für langsame, hochhaltende Anwendungen wie Druckköpfe. Sie bieten ein gutes Drehmoment, aber eine geringere Auflösung (oft 7,5°-Schritte) und niedrigere Drehzahlen als Hybride.
Reluktanz-Schrittmotor
Reluktanz-Rotoren (VR) bestehen aus weichmagnetischem Eisen mit Zähnen, die sich ohne Permanentmagnete auf den minimalen magnetischen Widerstand ausrichten. Hohe Drehzahl und Auflösung, aber kein Rastmoment; Einsatz in Präzisionsinstrumenten.
Hybrid-Schrittmotor
Hybrid-Bauweisen kombinieren einen PM-Rotor mit gezahnten Kappen und Stator und erreichen so überlegenes Drehmoment, Auflösung (0,9°-1,8°) und Drehzahl – dominierend in industriellen NEMA-Größen. HDBMotor-Hybride zeichnen sich in CNC und Robotik durch minimalen Schrittverlust unter Last aus.
Schrittwinkel und Auflösung
Schrittwinkel θ = 360° / (Schritte pro Umdrehung), z. B. 1,8° bei 200-Schritt-Motoren. Die Auflösung verbessert sich durch Mikroschritt: 1/16 ergibt 3200 Schritte/U oder 0,1125°.
Formel: Schritte/U = Phasen × Rotorzähne / m (Mikroschritte). Ingenieure berechnen die Lastanpassung: Auflösung (Grad/Schritt) = 360 / Schritte/U. Für hochpräzise OEM-Anwendungen 0,9°-Hybride einsetzen.
Drehmomentkurven verständlich erklärt
Drehmoment-Drehzahl-Kurven zeigen das verfügbare Drehmoment über der Impulsfrequenz: Pull-in (Start/Stopp) maximal bei niedriger Drehzahl, hyperbelförmig abnehmend; Pull-out (Dauerlauf) höher, erfordert aber Rampen. Resonanzabfall bei 100-200 Schritten/s erfordert Mikroschritt oder Dämpfer.
Kurvenbereiche: konstantes Drehmoment bis ~200 U/min, dann induktiver Abfall. Treiber mit Spannungsanhebung für flachere Kurven in Hochgeschwindigkeits-Applikationen wählen.
Haltemoment vs. Laufmoment
Das Haltemoment (statisch) ist maximal bei Stillstand mit vollem Strom und hält Lasten ohne Bewegung. Das Laufmoment (Pull-out) sinkt mit der Drehzahl aufgrund von Induktivität/EMK; Pull-in ist geringer für Direktstarts.
Im industriellen Einsatz eignet sich das Haltemoment für Klemmungen, das Laufmoment treibt Achsen an – Last <80 % Pull-out bei Maximaldrehzahl sicherstellen. Hybride bieten 2-15 Nm Haltemoment in NEMA 23-42.
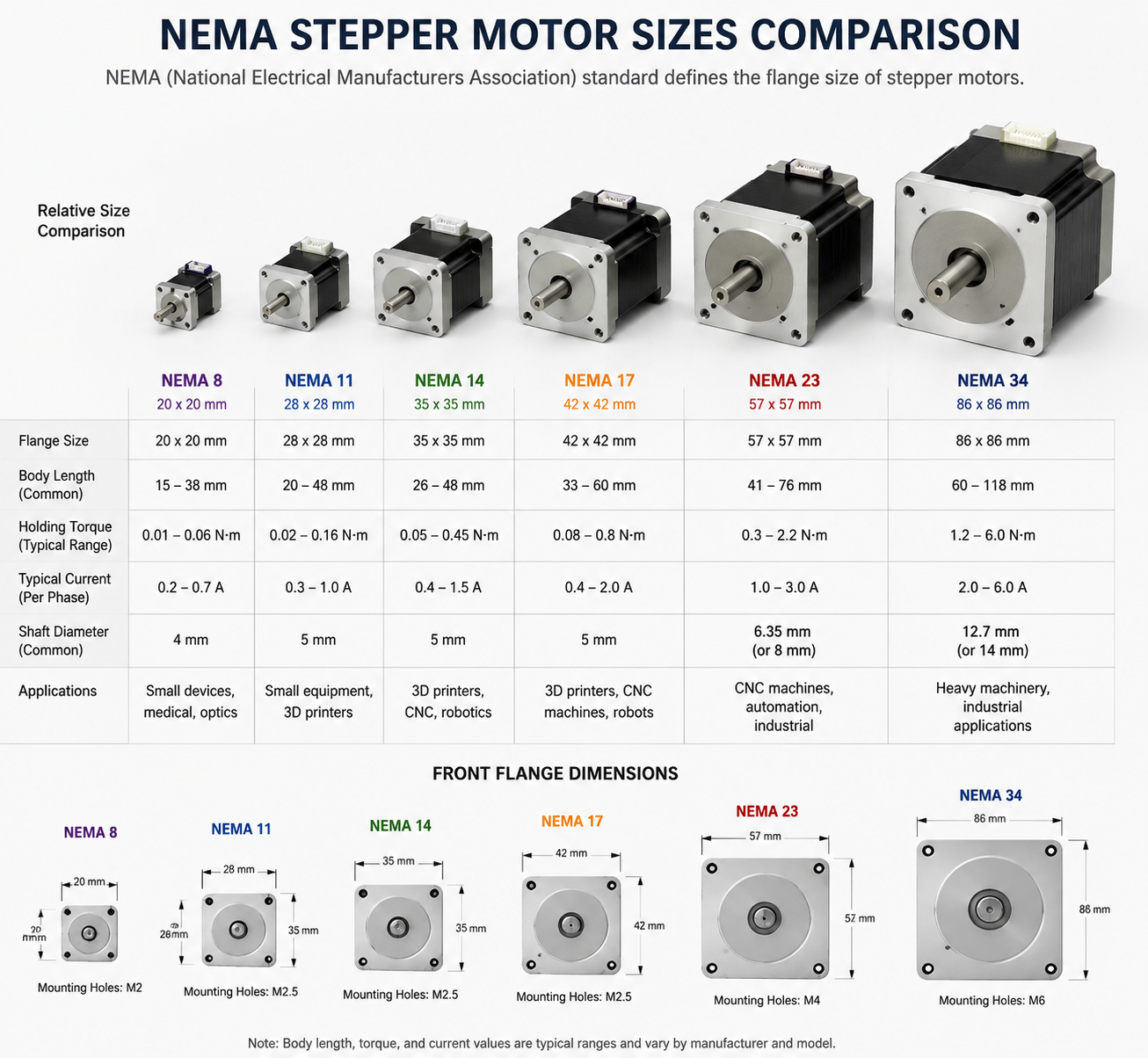
NEMA Schrittmotor Größen
NEMA-Normen definieren die Frontplattenabmessungen: NEMA 17 (42 mm) für leichte CNC, NEMA 23 (57 mm) für mittlere Fräsen. Größere NEMA 34/42 bewältigen schwere Industrielasten.
| NEMA Größe | Rahmen (mm) | Typ. Haltemoment (Nm) | Anwendungen |
|---|---|---|---|
| NEMA 17 | 42×42 | 0,2–0,88 | 3D-Drucker, Kleinroboter |
| NEMA 23 | 57×57 | 0,59–3,4 | CNC-Spindeln, FTF |
| NEMA 34 | 86×86 | 2,8–15 | Schwerautomation |
Closed-Loop Schrittmotoren
Closed-Loop-Systeme ergänzen den Motor um Encoder für Rückmeldung, korrigieren Schrittverluste und steigern das Drehmoment bei hohen Drehzahlen im Vergleich zum Open-Loop-Betrieb. Ideal für dynamische Lasten in der Robotik; HDBMotor Closed-Loop-Systeme halten 100 % Positionsgenauigkeit.
Vorteile: höhere Drehzahl/Drehmoment, Effizienz; Nachteile: Kosten, Komplexität.
Schrittmotortreiber
Treiber übernehmen Stromregelung, Mikroschritt (1/256) und Schnittstellen (Schritt/Richtung, PWM). Bipolare H-Brücken für Hybride; Auswahl nach Motorstrom (1-10 A). Chopper-Typen regulieren das Drehmoment; fortschrittliche ICs wie der MP6501A verhindern Überhitzung.
Schrittmotor Verkabelung Grundlagen
Bipolar: 4 Adern (zwei Spulen A+/A-, B+/B-); unipolar: 5-6 mit Mittelabgriffen. Sequenz: 1-2-3-4 für Vollschritt im Uhrzeigersinn. Fehlverdrahtung verursacht Vibrationen.
Mikroschritt-Technologie
Mikroschritt variiert die Phasenströme sinusförmig für 1/32+ Auflösung und reduziert Resonanz/Vibration. Kompromiss: geringeres Drehmoment pro Schritt, mögliche Schrittverluste in Extremlagen. Unverzichtbar für sanfte CNC-Bewegungen; Treiber wie der TMC2209 ermöglichen 256 Mikroschritte.
Schrittmotor Anwendungen
CNC
XY/Z-Achsen-Positionierung; NEMA 23 Hybride für Steifigkeit.
Robotik
Gelenkbetätigung; präzise Schritte für Endeffektoren.
Medizintechnik
Pumpendosierung, Scannerbetten; hygienetaugliche Hybride.
Verpackungsmaschinen
Befüllungs-/Siegel-Indexierung; hohe Zyklusraten.
Fahrerlose Transportfahrzeuge (FTF/AGV)
Radantrieb/Navigation; Closed-Loop für Lasten.
Schrittmotor vs. Servomotor
| Aspekt | Schrittmotor | Servomotor |
|---|---|---|
| Steuerung | Open-Loop Impulse | Closed-Loop Rückführung |
| Drehmoment/Drehzahl | Hohes Haltemoment bei niedriger Drehzahl | Hohe dynamische Drehzahl |
| Kosten | Niedriger | Höher |
| Präzision | Schrittbasiert | Kontinuierlich ±0,01° |
Schrittmotoren für kostensensible Positionierung; Servomotoren für Geschwindigkeitsregelung.
Schrittmotor Auswahl Leitfaden
1. Lastmoment + Trägheit + Beschleunigung berechnen.
2. NEMA-Größe/Haltemoment >1,5× Last wählen.
3. Drehzahl-Drehmoment-Kurve prüfen.
4. Treiber: Strom/Spannung dimensionieren.
5. Mikroschritte für Auflösung festlegen. HDBMotor berät bei kundenspezifischen Projekten. Wenn Sie mehr über die Produktion erfahren möchten, lesen Sie unseren Leitfaden zur Bewertung einer Schrittmotoren-Fabrik.
Häufige Schrittmotor Probleme
Schrittverluste: Überlast > Pull-out.
Überhitzung: hoher Strom, schlechte Kühlung.
Resonanz: Vibration bei 100 Hz; Mikroschritt/Dämpfung.
Fehlerbehebung: Verkabelung, Rampen prüfen.
OEM & Industrielle Beschaffungsstrategie
Bewerten Sie Fabriken auf ISO-Zertifizierungen, Mindestbestellmengen, Lieferzeiten und kundenspezifische Anpassungen (Wellen/Getriebe). Eine fundierte Lieferantenauswahl beginnt mit Markttransparenz – lesen Sie dazu unsere Analyse der führenden Schrittmotoren-Hersteller. Entdecken Sie zudem unsere gesamten Engineering- und OEM-Dienstleistungen für kundenspezifische Motion-Control-Lösungen. Für Anwendungen mit höheren Drehzahlen empfehlen wir unseren Leitfaden zu bürstenlosen Gleichstrommotoren (BLDC).
HDBMotor: 20+ Jahre Erfahrung, weltweiter Versand, Engineering-Support für USA/EU/Korea.
Häufig gestellte Fragen (FAQs)
Wie funktioniert ein Schrittmotor?
Durch sequenzielle Spulenbestromung, die rotierende Felder zur schrittweisen Ausrichtung erzeugt.
Was ist ein Closed-Loop-Schrittmotor?
Ein Open-Loop-System mit Encoder-Rückführung zur Fehlerkorrektur.
Schrittmotor vs. Servomotor?
Schrittmotoren: einfach, hohes Drehmoment bei niedriger Drehzahl; Servomotoren: hohe Drehzahl, maximale Präzision.
Was ist das Haltemoment?
Maximales statisches Drehmoment im Stillstand.
NEMA 17 vs. 23?
17: leichte Anwendungen; 23: höheres Drehmoment.
Warum überhitzen Schrittmotoren?
Konstante Stromaufnahme; Chopper und Kühlkörper einsetzen.
Was ist Mikroschritt?
Bruchteilschritte durch Strommodulation.
Fazit
Schrittmotoren bilden das Rückgrat der industriellen Motion Control mit unübertroffener Positionssicherheit und hohem Drehmoment. Setzen Sie auf HDBMotor für maßgeschneiderte Lösungen, die Ihre Automatisierung voranbringen. Fordern Sie noch heute eine technische Beratung an.