
Schrittmotoren zählen zu den am häufigsten eingesetzten Motion-Control-Komponenten in modernen Automatisierungssystemen. Von CNC-Maschinen und Robotik bis hin zu medizinischen Geräten und Halbleiter-Handling-Systemen liefern Schrittmotoren eine präzise und wiederholgenaue Positionierung – ohne komplexe Rückführungssysteme zu benötigen.
Für Ingenieure und OEM-Entwickler ist das Verständnis der Schrittmotor Funktionsweise essenziell, um kosteneffiziente und zuverlässige Bewegungssysteme zu konstruieren. Wenn Sie tiefer in die Materie einsteigen möchten, empfehlen wir unsere umfassende Schrittmotor Grundlagen: Typen, Auswahl & OEM-Beschaffung.
Anders als konventionelle AC- oder DC-Motoren, die kontinuierlich rotieren, bewegen sich Schrittmotoren in diskreten Winkelschritten. Jeder elektrische Impuls vom Controller erzeugt eine definierte mechanische Bewegung.
Was ist ein Schrittmotor?
Ein Schrittmotor ist ein bürstenloser synchroner Elektromotor, der eine volle Umdrehung in mehrere gleiche Schritte unterteilt. Anstatt kontinuierlich zu rotieren, bewegt sich der Rotor schrittweise entsprechend den elektrischen Impulsbefehlen, die vom Motion Controller oder Schrittmotortreiber erzeugt werden.
Typische Merkmale:
1,8° Schrittwinkel (200 Schritte pro Umdrehung)
0,9° Schrittwinkel (400 Schritte pro Umdrehung)
Mikroschritt für sanftere Bewegungen
Digitale impulsbasierte Positionssteuerung
Dieses Funktionsprinzip macht Schrittmotoren ideal für Anwendungen, die präzise Positionskontrolle, Wiederholgenauigkeit und hohes Drehmoment bei niedrigen Drehzahlen erfordern.
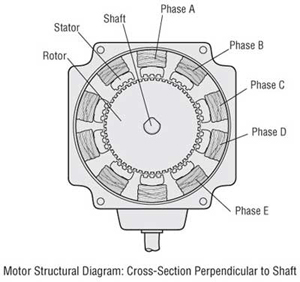
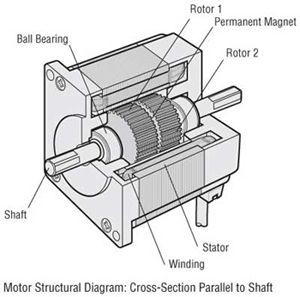
Grundlegender Aufbau eines Schrittmotors
Um die elektromagnetische Funktionsweise zu verstehen, müssen Ingenieure zunächst den grundlegenden Aufbau eines Schrittmotors kennen.
| Komponente | Funktion |
|---|---|
| Stator | Enthält elektromagnetische Spulen, die Magnetfelder erzeugen |
| Rotor | Rotierendes Element, das durch magnetische Anziehung ausgerichtet wird |
| Treiber | Steuert die Stromumschaltsequenz |
| Controller | Erzeugt Impuls- und Richtungssignale |
| Lager & Welle | Unterstützen die mechanische Rotation und Lastübertragung |
Wie funktioniert ein Schrittmotor?
Das Funktionsprinzip eines Schrittmotors basiert auf elektromagnetischer Anziehung und der gesteuerten Rotation des Magnetfeldes. Fließt Strom durch eine Statorwicklung, wird diese zum Elektromagneten. Der Rotor richtet sich am erregten Magnetfeld aus.
Durch sequenzielles Bestromen der Statorphasen rotiert das Magnetfeld schrittweise und zwingt den Rotor, dieser Bewegung zu folgen.
Kernablauf der Schrittmotor Funktionsweise
Der Treiber bestromt eine Statorphase
Ein Magnetfeld wird erzeugt
Der Rotor richtet sich am erregten Pol aus
Der Treiber schaltet den Strom zur nächsten Phase um
Das Magnetfeld rotiert weiter
Der Rotor bewegt sich zur nächsten Position
Der Zyklus wiederholt sich kontinuierlich
Dieser Prozess wandelt elektrische Impulssignale in hochkontrollierte, schrittweise Drehbewegungen um.
Prinzip der elektromagnetischen Feldrotation
Das wichtigste Konzept zum Verständnis der Schrittmotor Funktionsweise ist die Erzeugung eines rotierenden Magnetfeldes. Jede Statorphase erzeugt bei Bestromung ein Magnetfeld. Der Treiber steuert dabei präzise die zeitliche Abfolge und die Umschaltreihenfolge des Stroms.
Während verschiedene Spulen nacheinander bestromt werden, verschiebt sich das Magnetfeld um den Stator herum. Der Rotor folgt diesem wandernden Magnetfeld natürlicherweise, da magnetische Systeme stets den Zustand minimaler magnetischer Reluktanz und maximaler magnetischer Ausrichtung anstreben.
Warum die Bewegung in diskreten Schritten erfolgt
Anders als konventionelle Motoren, die ein kontinuierliches Drehmoment erzeugen, sind Schrittmotoren mit mehreren Statorpolen und gezahnten Rotorstrukturen konstruiert. Jeder Phasenwechsel bewegt den Rotor um einen festen Winkelbetrag:
1,8° Schrittwinkel = 200 Schritte pro Umdrehung
0,9° Schrittwinkel = 400 Schritte pro Umdrehung
Diese vorhersagbare Bewegung ermöglicht in vielen Anwendungen eine Open-Loop-Positionssteuerung ohne Rückführungs-Encoder.
Phasenerregungssequenz des Schrittmotors
Die Rotation eines Schrittmotors hängt vollständig von der Reihenfolge der Phasenerregung ab. Die folgende Tabelle zeigt eine vereinfachte Phasenerregungssequenz für einen typischen zweiphasigen Schrittmotor und demonstriert, wie elektrische Impulse in diskrete mechanische Bewegung umgewandelt werden.
| Schritt | Phase A | Phase B |
|---|---|---|
| 1 | Positiv | Aus |
| 2 | Aus | Positiv |
| 3 | Negativ | Aus |
| 4 | Aus | Negativ |
Diese Phasensequenz ist das grundlegende Funktionsprinzip hinter allen Schrittmotor-Steuerungsalgorithmen in industriellen Automatisierungssystemen.
Wie Impulssignale die Bewegung steuern
Schrittmotoren sind digital gesteuerte Systeme. Jeder vom Controller erzeugte Impuls entspricht einem mechanischen Schritt. Die Bewegung wird direkt durch digitale Impulssignale gesteuert, die von einer SPS oder einem Motion Controller generiert werden. Jeder Impulsparameter definiert einen spezifischen Aspekt des Motorverhaltens.
| Impulsparameter | Motorverhalten |
|---|---|
| Impulsanzahl | Steuert die Position |
| Impulsfrequenz | Steuert die Drehzahl |
| Impulssequenz | Steuert die Drehrichtung |
Diese impulsbasierte Steuerungsarchitektur ist die Grundlage aller modernen Schrittmotor-Antriebssysteme in CNC, Robotik und Industrieautomation.
Vollschritt vs. Halbschritt vs. Mikroschritt
Moderne Schrittmotortreiber unterstützen mehrere Betriebsarten, die sich direkt auf Auflösung, Laufruhe und Anwendungseignung auswirken.
Vollschritt-Modus
Der Rotor bewegt sich pro Impuls um einen vollen Schrittwinkel. Höchstes Drehmoment, einfachste Ansteuerung, jedoch stärkere Vibration.
Halbschritt-Modus
Der Treiber wechselt zwischen Einphasen- und Zweiphasen-Bestromung. Sanftere Bewegung, höhere Positionierauflösung, reduzierte Resonanz.
Mikroschritt
Mikroschritt nutzt sinusförmige Stromregelung, um jeden Vollschritt in kleinere Inkremente zu unterteilen. Unverzichtbar für sanfte CNC-Bewegungen und Präzisionsautomation.
| Modus | Auflösung | Laufruhe | Typische Anwendung |
|---|---|---|---|
| Vollschritt | 200 Schritte/U | Mittel | Allgemeine Automation |
| Halbschritt | 400 Schritte/U | Gut | Verpackungsanlagen |
| Mikroschritt | 1600+ Schritte/U | Hervorragend | CNC & Medizintechnik |
Warum Schrittmotoren ein Haltemoment erzeugen
Ein wesentlicher Vorteil von Schrittmotoren ist das Haltemoment. Wenn der Motor bestromt, aber stationär ist, hält das Statormagnetfeld den Rotor fest in Position.
Positionshaltung ohne Bremsen
Stabiler Stillstandbetrieb
Verbesserte Positionierwiederholgenauigkeit
Halten vertikaler Lasten
Warum das Drehmoment bei höheren Drehzahlen abnimmt
Eine typische technische Eigenschaft von Schrittmotoren ist der Drehmomentabfall bei steigender Drehzahl. Dies geschieht aus folgenden Gründen:
Die Induktivität begrenzt die Stromanstiegszeit
Höhere Impulsfrequenzen reduzieren die Magnetfeldaufbauzeit
Die Gegen-EMK steigt mit der Drehzahl
Die Rotorträgheit begrenzt das dynamische Ansprechverhalten
Wie Schrittmotortreiber funktionieren
Der Schrittmotortreiber fungiert als elektronische Schnittstelle zwischen Controller und Motor. Zu seinen Aufgaben gehören Stromregelung, Phasenumschaltung, Mikroschritt-Erzeugung, Überstromschutz und Impulsinterpretation. Moderne digitale Treiber nutzen fortschrittliche Stromregelalgorithmen, um die Effizienz zu verbessern und Resonanzen zu reduzieren.
Industrielle Anwendungen von Schrittmotoren
Schrittmotoren werden aufgrund ihrer hohen Positioniergenauigkeit, Wiederholbarkeit und kosteneffizienten Open-Loop-Steuerung in zahlreichen Industrieautomationsbranchen eingesetzt.
| Branche | Typische Anwendungen | Vorteile |
|---|---|---|
| CNC-Bearbeitung | X/Y/Z-Achsen-Positionierung | Hohe Wiederholgenauigkeit |
| Medizintechnik | Pumpen, Analysatoren | Sanfte Langsamfahrt, hohe Präzision |
| Verpackungstechnik | Etikettierung, Indexierung | Präzise Inkrementalpositionierung |
| Robotik | Linearaktuatoren, Gelenke | Zuverlässige Impulssteuerung |
| 3D-Druck | Extruder, Achsbewegung | Hohe Genauigkeit, niedrige Kosten |
Häufige Schrittmotor Probleme
Schrittverluste
Meist verursacht durch unzureichendes Drehmoment, zu hohe Beschleunigung oder falsche Treiberstromeinstellungen.
Übermäßige Vibration
Oft verbunden mit Resonanzen bei bestimmten Betriebsdrehzahlen.
Überhitzung
Typischerweise verursacht durch zu hohe Stromeinstellungen oder unzureichende Kühlung.
Geräusche im Betrieb
Können durch Mikroschritt-Treiber und verbesserte Beschleunigungskalibrierung reduziert werden.
Schrittmotor Auswahl: Darauf achten Ingenieure
Die richtige Motorauslegung erfordert die Abstimmung von Drehmoment, Drehzahl, Trägheit, Spannung und thermischem Verhalten. Entscheidende Faktoren sind:
Erforderliches Lastdrehmoment
Beschleunigungsprofil
Maximale Betriebsdrehzahl
Einschaltdauer
Treiberkompatibilität
Versorgungsspannung
Mechanisches Übertragungssystem
Bei der Beschaffung ist zudem die Wahl des richtigen Herstellers entscheidend. Lesen Sie dazu unsere Analyse der führenden Schrittmotoren-Hersteller und unseren Leitfaden zur Bewertung einer Schrittmotoren-Fabrik. Für Applikationen mit Getriebe empfehlen wir zudem unseren Ratgeber für Getriebe-Schrittmotor Hersteller.
Falls Ihre Anwendung höhere Drehzahlen erfordert, werfen Sie einen Blick in unseren technischen Leitfaden zu bürstenlosen DC-Motoren (BLDC).
Häufig gestellte Fragen (FAQs)
Wie bewegt sich ein Schrittmotor schrittweise?
Ein Schrittmotor bewegt sich inkrementell, da die Statorphasen sequenziell bestromt werden und rotierende Magnetfelder erzeugen, die den Rotor in diskrete Positionen ziehen.
Warum sind Schrittmotoren so präzise?
Schrittmotoren arbeiten mit festen Schrittwinkeln und digitaler Impulssteuerung und ermöglichen so eine hochgradig wiederholgenaue Positionierung.
Was steuert die Drehzahl eines Schrittmotors?
Die Motordrehzahl wird durch die vom Controller erzeugte Impulsfrequenz gesteuert.
Was ist Mikroschritt?
Mikroschritt unterteilt die vollen Schritte eines Motors durch sinusförmige Stromregelung in kleinere Inkremente.
Warum nimmt das Drehmoment bei hohen Drehzahlen ab?
Bei höheren Drehzahlen reduzieren Induktivität und Gegen-EMK den effektiven Phasenstrom, wodurch das verfügbare Drehmoment sinkt.
Benötigen Schrittmotoren Encoder?
Klassische Open-Loop-Systeme benötigen keine Encoder, obwohl Closed-Loop-Systeme zunehmend Feedback für höhere Zuverlässigkeit einsetzen.
Fazit
Das Verständnis der Schrittmotor Funktionsweise ist essenziell für die Entwicklung effizienter und zuverlässiger Motion-Control-Systeme. Durch die Kombination aus elektromagnetischer Feldsteuerung, impulsgesteuerter Positionierung und präziser Phasenerregung bieten Schrittmotoren Ingenieuren eine einfache und dennoch hocheffektive Lösung für die Industrieautomation.
Ob in CNC-Systemen, Robotik, Medizintechnik oder Verpackungsmaschinen – Schrittmotoren spielen weiterhin eine zentrale Rolle in der modernen Motion-Control-Technik.
Jetzt Kontakt aufnehmen – für eine unverbindliche technische Beratung zu Ihrem Schrittmotor-Projekt