
Wenn ein Automatisierungsingenieur mit der Spezifikation von Motion-Control-Komponenten beginnt, steht eine Frage im Zentrum jeder Beschaffungsentscheidung: Wie genau funktioniert ein Schrittmotor, und was bedeutet das für meine Anwendung?
Das Schrittmotor Funktionsprinzip ist täuschend einfach – digitale Impulse in präzise mechanische Rotation umwandeln – aber die technische Realität hinter dieser Aussage entscheidet darüber, ob Ihr Positioniersystem seine Genauigkeitsziele erreicht oder komplett verfehlt. Das Verständnis von Phasenerregung, Schrittwinkel und Drehmomentverhalten ist keine akademische Theorie. Es ist der Unterschied zwischen einer Maschine, die jahrelang zuverlässig läuft, und einer, die bereits am dritten Tag unter Last stehen bleibt.
Dieser Leitfaden führt Sie durch das vollständige Funktionsprinzip, von den magnetischen Grundlagen bis zu den praktischen Auswahlparametern. Wir verbinden jedes theoretische Konzept direkt mit einer realen Beschaffungsentscheidung, sodass Sie am Ende genau wissen, welche Spezifikationen für Ihre Anwendung relevant sind.
Dieser Artikel ist Teil einer umfassenden Wissensreihe. Die zentrale Pillar Page finden Sie hier: Schrittmotor Grundlagen: Typen, Auswahl & OEM-Beschaffung. Für eine kompakte Einführung in die Funktionsweise empfehlen wir zudem unseren Artikel Wie funktioniert ein Schrittmotor? – ideal als Einstieg ins Thema.
Wie ein Schrittmotor elektrische Impulse in mechanische Bewegung umwandelt
Im Kern ist ein Schrittmotor ein bürstenloser Gleichstrommotor, der eine vollständige Umdrehung in eine festgelegte Anzahl gleicher Schritte unterteilt. Anders als ein herkömmlicher DC-Motor, der kontinuierlich dreht, sobald Spannung anliegt, bewegt sich ein Schrittmotor in diskreten Winkelschritten – jeder ausgelöst durch einen digitalen Impuls vom Treiber.
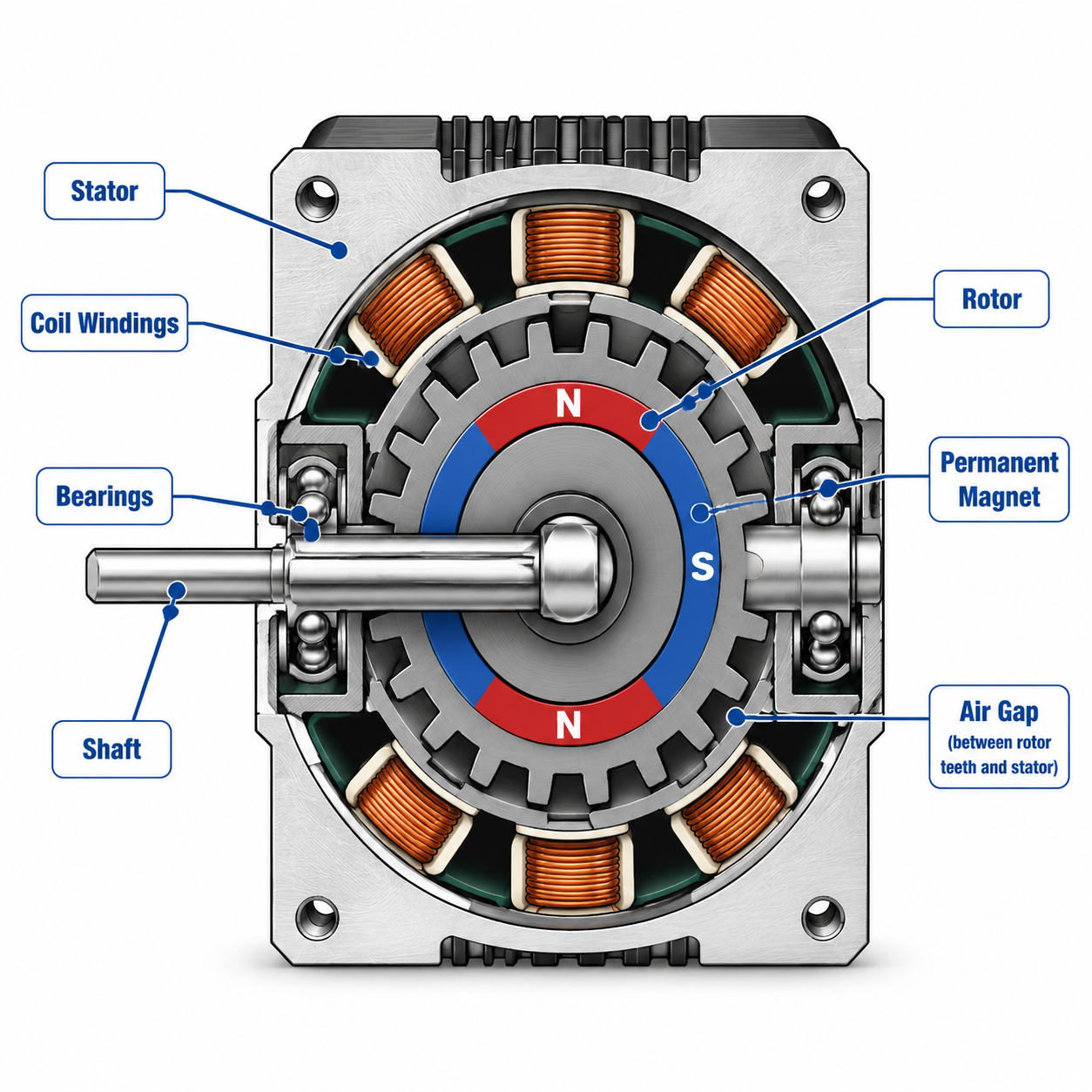
Das passiert im Inneren des Motors bei jedem Impuls:
Der Treiber bestromt eine oder mehrere Statorwicklungen in einem bestimmten Polaritätsmuster.
Dadurch entsteht ein Magnetfeld im Stator.
Der Rotor, der Permanentmagnete oder einen magnetisch weichen, gezahnten Kern enthält, richtet sich am Statorfeld aus.
Der Rotor rastet in der Position des minimalen magnetischen Widerstands ein.
Schaltet der Treiber zur nächsten Wicklungskombination um, bewegt sich der Rotor in die neue Ausrichtungsposition.
Dies ist das fundamentale Schrittmotor Funktionsprinzip: kontrollierte magnetische Anziehung und Abstoßung, die vorhersagbare, wiederholbare Bewegungen erzeugt. Jeder Wechsel des Wicklungsbestromungsmusters erzeugt einen „Schritt" – eine festgelegte Winkelrotation.
Die entscheidende technische Erkenntnis: Da sich der Rotor zu einer definierten magnetischen Gleichgewichtsposition bewegt und nicht zu einem beliebigen, durch Last und Geschwindigkeit bestimmten Punkt, erreichen Schrittmotoren eine Open-Loop-Positionssteuerung ohne Encoder. Senden Sie 200 Impulse, und Sie wissen, dass sich die Welle exakt um 360 Grad gedreht hat (bei einem Standardmotor mit 1,8° Schrittwinkel). Dieses deterministische Verhalten ist der Grund, warum Schrittmotoren in Positionieranwendungen dominieren – von der Laborautomation bis zu CNC-Fräsen.
Schrittwinkel erklärt: Die Grundlage der Positioniergenauigkeit
Was den Schrittwinkel bestimmt
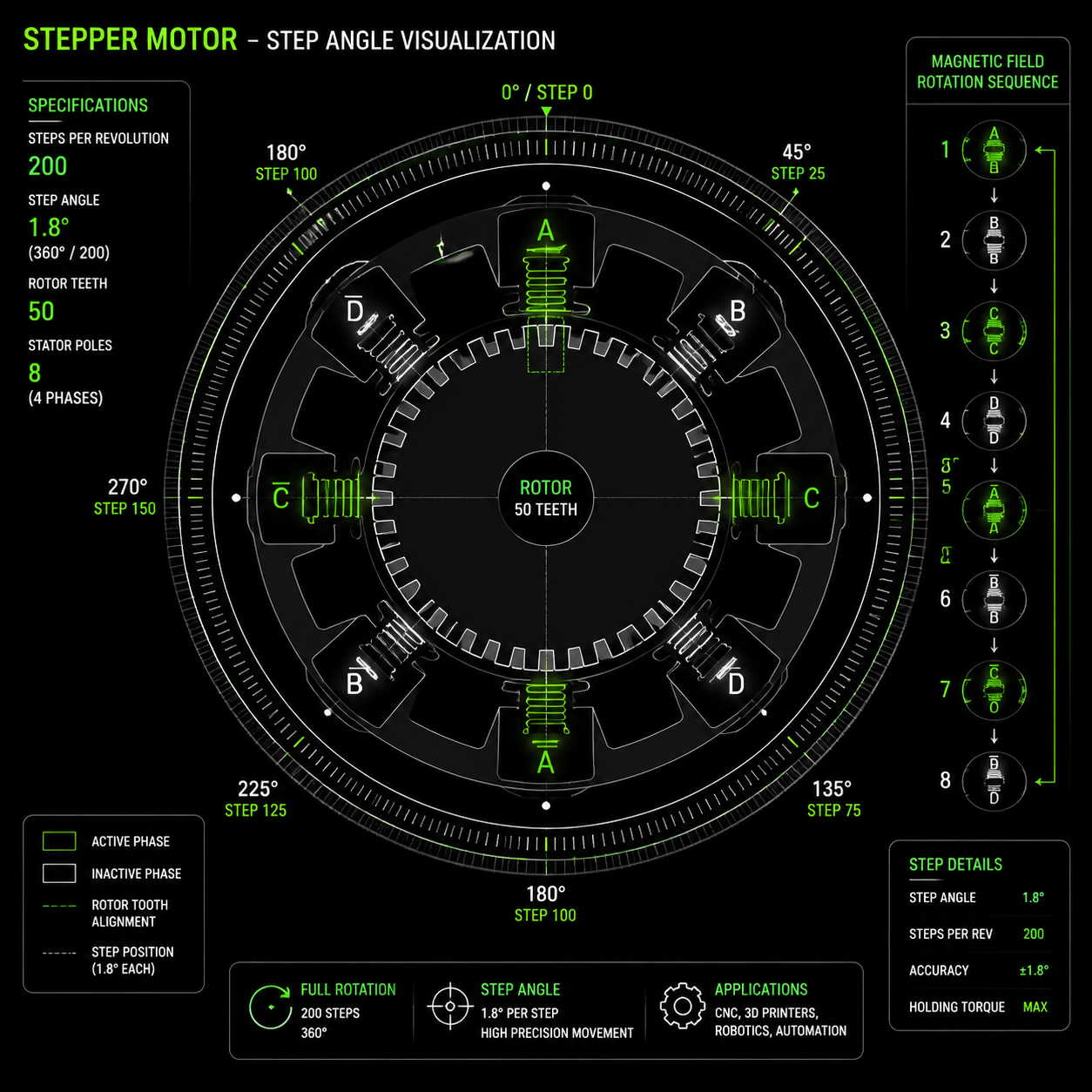
Der Schrittwinkel ist die kleinste Winkelbewegung, die ein Schrittmotor im Vollschrittbetrieb ausführen kann. Er wird durch die mechanische Konstruktion des Motors definiert – genauer gesagt durch die Anzahl der Rotorzähne und Statorpole.
Die Formel:
Schrittwinkel = 360° ÷ (Anzahl der Rotorzähne × Anzahl der Phasen)
Für einen typischen Hybrid-Schrittmotor mit 50 Rotorzähnen und 2 Phasen ergibt sich im Vollschrittbetrieb der branchenübliche Schrittwinkel von 1,8° (200 Schritte pro Umdrehung).
Der Schrittwinkel eines Schrittmotors bestimmt seine Positionierauflösung und ist ein zentraler Parameter bei der Motorauswahl für präzise Motion-Control-Systeme.
| Schrittwinkel | Schritte pro Umdrehung | Typische Anwendung |
|---|---|---|
| 0,9° | 400 | Hochpräzise Positionierung, Halbleiterausrüstung |
| 1,8° | 200 | Allgemeine Automation, CNC-Maschinen, 3D-Drucker |
| 3,6° | 100 | Kostengünstige Industrieanwendungen, Ventilstellantriebe |
| 7,5° | 48 | Bestandsanlagen, Rundtaktindexierer |
| 15° | 24 | Günstige Consumer-Geräte |
Warum der Schrittwinkel für die Beschaffung entscheidend ist
Bei der Auswahl eines Schrittmotors bestimmt der Schrittwinkel direkt die theoretische Positionierauflösung Ihres Systems – noch vor dem Mikroschritt. Ein 1,8°-Motor, der eine Kugelgewindespindel mit 5 mm Steigung antreibt, liefert 0,025 mm lineare Auflösung pro Vollschritt. Dieselbe Konfiguration mit einem 0,9°-Motor liefert 0,0125 mm – doppelte Auflösung, ohne etwas anderes im Antriebsstrang zu ändern.
Allerdings gehen kleinere Schrittwinkel meist mit einem Kostenaufschlag einher und können das maximale Haltemoment aufgrund der feineren Zahngeometrie leicht reduzieren. Die Beschaffungsentscheidung wägt Auflösungsanforderungen gegen Drehmoment- und Budgetbeschränkungen ab.
Phasenkonfigurationen: 2-Phasen-, 3-Phasen- und 5-Phasen-Motoren
Phasen im Schrittmotor verstehen
Eine „Phase" bezeichnet in der Schrittmotor-Terminologie eine unabhängige Wicklungsgruppe auf dem Stator. Wird eine Phase bestromt, erzeugt sie ein magnetisches Polpaar. Die Anzahl der Phasen bestimmt die Komplexität des Erregungsmusters und beeinflusst Laufruhe, Drehmomentwelligkeit und Resonanzverhalten.
2-Phasen-Schrittmotoren:
Das Arbeitstier der Branche. Zwei unabhängige Wicklungen (oft aufgeteilt in A+/A- und B+/B-) erzeugen durch sequenzielle Bestromung ein rotierendes Magnetfeld. Diese Motoren machen rund 80 % aller Schrittmotoranwendungen aus. Sie bieten eine hervorragende Balance aus Kosten, Treibereinfachheit und Leistung.
Die Ansteuerungsart definiert, wie Statorwicklungen sequenziell bestromt werden. Dies wirkt sich direkt auf Schrittgröße, Drehmomentabgabe und Bewegungsruhe aus.
| Ansteuerungsart | Sequenzmuster | Schrittgröße | Drehmoment | Laufruhe |
|---|---|---|---|---|
| Vollschritt (1 Phase) | A → B → A' → B' | Voller Schrittwinkel | Niedrigster | Rau (hohe Drehmomentwelligkeit) |
| Vollschritt (2 Phasen) | AB → BA' → A'B' → B'A | Voller Schrittwinkel | ~1,4× Einphasen-Drehmoment | Moderat |
| Halbschritt | A → AB → B → BA' → A' → A'B' → B' → B'A | Halber Schrittwinkel | Variabel pro Schritt | Verbessert |
| Mikroschritt | Sinusförmige Stromregelung | Bruchteilschritt | Gleichmäßige Drehmomentabgabe | Hervorragend |
3-Phasen-Schrittmotoren:
Drei Wicklungen, um 120° versetzt. Das dreiphasige Design erzeugt inhärent ruhigere Bewegungen, da die Drehmomentwelligkeit eine höhere Frequenz und niedrigere Amplitude aufweist. Diese Motoren glänzen in vibrationsempfindlichen Anwendungen wie medizinischen Bildgebungssystemen oder Präzisionsmesstechnik. Die Treiberelektronik ist komplexer und in der Regel teurer als bei 2-Phasen-Äquivalenten.
5-Phasen-Schrittmotoren:
Fünf Wicklungen erzeugen 500 oder 1000 Vollschritte pro Umdrehung (0,72° oder 0,36° Schrittwinkel). Die Hauptvorteile sind extrem ruhiger Lauf und reduzierte Resonanz, was 5-Phasen-Motoren zur Wahl für Halbleiter-Wafer-Handling, hochwertige optische Systeme und Anwendungen macht, bei denen Vibration absolut tabu ist. Der Kompromiss: deutlich höhere Stückkosten und weniger Treiberoptionen am Markt.
Die richtige Phasenkonfiguration wählen
Wählen Sie 2-phasig für allgemeine Automatisierung, kostensensible Projekte und Anwendungen, bei denen Mikroschritt Laufruheprobleme lösen kann.
Wählen Sie 3-phasig, wenn Vibrationsreduktion wichtig ist, aber 5-Phasen-Kosten zu hoch sind.
Wählen Sie 5-phasig nur dann, wenn sowohl ultra-ruhiger Lauf als auch native Hochauflösung zwingend erforderlich sind – und das Budget es zulässt.
Drehmomentverhalten: Haltemoment, Anlaufmoment und Kippmoment
Das Verständnis der Drehmomentkurven von Schrittmotoren ist essenziell, denn das Drehmoment ist nicht konstant. Es sinkt mit steigender Drehzahl erheblich, und bei unterschiedlichen Betriebsbedingungen gelten unterschiedliche Drehmomentdefinitionen.
Haltemoment
Das Haltemoment ist das maximale statische Drehmoment, das der Motor bei anliegendem Nennstrom aber ohne Rotation halten kann. Dies ist die Spezifikation, die Sie auf den meisten Datenblättern prominent sehen – sie gilt jedoch nur bei Stillstand. Ein typischer NEMA-23-Schrittmotor mag 1,26 N·m Haltemoment aufweisen, aber dieser Wert sagt Ihnen nicht, welches Drehmoment bei 500 oder 1000 U/min verfügbar ist.
Anlaufmoment (Pull-In)
Das Anlaufmoment ist das maximale Lastmoment, gegen das der Motor ohne Hochlauframpe starten und stoppen kann, ohne die Synchronisation zu verlieren. Es ist stets niedriger als das Haltemoment und sinkt mit zunehmender Schrittfrequenz weiter.
Kippmoment (Pull-Out)
Das Kippmoment ist das maximale Drehmoment, das der Motor bei konstanter Drehzahl entwickeln kann – das Drehmoment, bei dem der Motor bei weiterer Belastung stehen bleibt. Dies ist die wichtigste Kennzahl für Anwendungen, bei denen der Motor kontinuierlich mit Drehzahl läuft.
Drehmoment-Drehzahl-Verhältnis (Typischer NEMA 23, 1,8° Schrittmotor)
Die Drehmoment-Drehzahl-Kennlinie ist eine der wichtigsten Leistungskurven eines Schrittmotors. Mit zunehmender Drehzahl sinkt das verfügbare Drehmoment aufgrund von Induktivität und Gegen-EMK-Effekten.
| Drehzahl (U/min) | Kippmoment (N·m) | % des Haltemoments | Betriebsbereich |
|---|---|---|---|
| 0 | 1,26 (Halten) | 100 % | Statische Haltefunktion |
| 100 | 1,05 | 83 % | Positionierung bei niedriger Drehzahl |
| 300 | 0,72 | 57 % | Mittlere Drehzahl |
| 600 | 0,42 | 33 % | Kontinuierlicher Bewegungsbereich |
| 1000 | 0,25 | 20 % | Hochdrehzahl (nahe Grenze) |
| 1500 | 0,12 | 10 % | Nur Leichtlastbetrieb |
Zentrale Erkenntnis für die Beschaffung: Prüfen Sie stets die Drehmoment-Drehzahl-Kurve für Ihre erwartete Betriebsdrehzahl. Ein Motor mit beeindruckendem Haltemoment kann bei der Betriebsdrehzahl Ihrer Anwendung völlig unzureichend sein.
Vollschritt, Halbschritt und Mikroschritt: Auflösung vs. Drehmoment
Vollschrittbetrieb
Im Vollschritt-Modus wechselt der Treiber zwischen den Wicklungszuständen im natürlichen Schrittintervall des Motors. Bei einem 1,8°-Motor sind das 200 Schritte pro Umdrehung. Einfach anzusteuern, liefert maximales Drehmoment pro Schritt bei niedrigen Drehzahlen. Nachteil: deutliche Drehmomentwelligkeit. Bei bestimmten Drehzahlen kann die Vollschritt-Erregung mechanische Resonanzen anregen – typischerweise zwischen 100–200 U/min bei vielen NEMA-23-Motoren.
Halbschrittbetrieb
Der Halbschritt-Modus wechselt zwischen Einphasen- und Zweiphasen-Bestromung und erzeugt 400 Schritte pro Umdrehung. Wechselndes Drehmoment führt zu ungleichmäßiger Bewegung, verdoppelt aber die Auflösung mit minimalem zusätzlichem Treiberaufwand.
Mikroschritt
Mikroschritt moduliert den Wicklungsstrom mit sinusförmigen Kurven und erzeugt Zwischenpositionen zwischen den Vollschrittpunkten. Ein 1,8°-Motor bei 16x Mikroschritt liefert 3200 Mikroschritte pro Umdrehung – eine theoretische Auflösung von 0,1125°.
Wichtiger technischer Vorbehalt: Mikroschritt verbessert die Laufruhe dramatisch, aber nicht unbedingt die Genauigkeit im gleichen Maße. Das inkrementelle Drehmoment, das für Zwischenpositionen zur Verfügung steht, sinkt mit abnehmendem Bruchteil. Sehr feine Mikroschritte (jenseits von 16x oder 32x) bringen abnehmende Erträge für die tatsächliche Positioniergenauigkeit. Sie sind vor allem zur Reduzierung von Vibration und hörbarem Lärm nützlich.
Vergleich der Ansteuerungsarten
| Ansteuerungsart | Schritte/U (1,8° Motor) | Drehmomentwelligkeit | Beste Anwendung |
|---|---|---|---|
| Vollschritt | 200 | Hoch – Resonanzrisiko | Langsamlauf, kostensensitive Indexiersysteme |
| Halbschritt | 400 | Moderat | Bestands-Automatisierungssysteme |
| 4x Mikroschritt | 800 | Niedrig | Allgemeine Industrieautomation |
| 8x Mikroschritt | 1600 | Sehr niedrig | Laufruhige Bewegungssysteme |
| 16x Mikroschritt | 3200 | Minimal | 3D-Druck, leichte CNC-Systeme |
| 32–256x Mikroschritt | 6400–51200 | Nahezu kontinuierlich | Geräuschsensible Präzisionsumgebungen |
Treiberauswahl: Warum der Treiber die reale Leistung bestimmt
Ein Schrittmotor kann ohne Treiber nicht funktionieren – und die Spezifikationen des Treibers steuern direkt, wie gut der Motor seine theoretischen Fähigkeiten ausschöpft.
Versorgungsspannung
Die Versorgungsspannung des Treibers ist der wichtigste Einzelfaktor für Drehmoment bei hohen Drehzahlen. Eine höhere Spannung treibt den Strom schneller in die induktiven Wicklungen und erhält so das Drehmoment bei höheren Schrittfrequenzen. Wählen Sie stets einen Treiber mit der höchsten praktikablen Spannung innerhalb der Isolationsgrenzen des Motors.
Nennstrom
Der Treiber sollte den Nennstrom des Motors komfortabel übertreffen. Faustregel: Treiber mit mindestens 30 % Reserve über dem Motornennstrom wählen.
Mikroschritt-Fähigkeit
Selbst wenn Sie keine Ultra-Feinauflösung benötigen, sorgt Mikroschritt für ruhigeren Lauf und reduzierte Resonanz. Moderne Treiber bieten standardmäßig mindestens 16x Mikroschritt.
Häufige Treiber-Konfigurationsfehler
Treiberstrom zu niedrig eingestellt: Reduziert das Drehmoment über den gesamten Drehzahlbereich.
Betrieb mit unzureichender Spannung: Erstickt das Hochdrehzahl-Drehmoment.
Stillstandsstromreduzierung ignoriert: Viele Treiber senken den Strom im Stillstand automatisch ab. Prüfen Sie, ob dies mit Ihren Haltemoment-Anforderungen vereinbar ist.
Falsche Mikroschritt-Einstellung: Zu hoch bringt keinen echten Positioniervorteil; zu niedrig verursacht rauen Lauf.
Häufige Open-Loop-Probleme und wie Sie diese durch richtige Auswahl vermeiden
Schrittverluste
Wenn das Lastmoment das verfügbare Motordrehmoment bei einer gegebenen Drehzahl übersteigt, kann der Rotor dem Statorfeld nicht folgen. Verlorene Schritte führen zu kumulativem Positionsfehler ohne automatische Korrektur.
Prävention durch Auswahl:
Motor mit mindestens 30–50 % Drehmomentreserve über den berechneten Lastanforderungen dimensionieren.
Drehmomentabfall bei Betriebsdrehzahl berücksichtigen, nicht nur das Haltemoment.
Beschleunigungsrampen für hohe Trägheitslasten vorsehen.
Resonanz und Mid-Band-Instabilität
Schrittmotoren zeigen Eigenresonanzen, bei denen das Drehmoment stark abfällt und die Vibration zunimmt – typischerweise 100–200 U/min bei NEMA 23.
Prävention durch Auswahl:
Treiber mit Anti-Resonanz-Funktionen verwenden.
Mikroschritt-Treiber einsetzen, die Stromübergänge glätten.
Dauerbetrieb in bekannten Resonanzdrehzahlbereichen vermeiden.
3- und 5-Phasen-Motoren reduzieren die Resonanzamplitude inhärent.
Überhitzung
Schrittmotoren ziehen im Stillstand vollen Nennstrom, um das Haltemoment aufrechtzuerhalten. Motoren mit 80°C Übertemperatur können im Normalbetrieb über 100°C Oberflächentemperatur erreichen.
Prävention durch Auswahl:
Isolationsklasse prüfen (Klasse B: max. 130°C; Klasse F: max. 155°C).
Treiber mit Stillstandsstromabsenkung bei langen Stillstandsphasen.
Ausreichende Montagefläche zur Wärmeableitung vorsehen.
Schrittmotor-Auswahl-Checkliste
Die Schrittmotor-Auswahl ist ein systematischer Engineering-Prozess, der Drehmoment, Drehzahl, Auflösung und Umgebungsbedingungen in Einklang bringt.
| Auswahlschritt | Schlüsselfragen | Relevante Motorspezifikation |
|---|---|---|
| 1. Bewegungsprofil definieren | Verfahrweg, Geschwindigkeit, Beschleunigung | Schrittwinkel, Drehmoment-Drehzahl-Kurve |
| 2. Lastmoment berechnen | Trägheit, Reibung, externe Kräfte | Haltemoment, Kippmoment |
| 3. Auflösung bestimmen | Erforderliche Positioniergenauigkeit | Schrittwinkel, Mikroschritt-Level |
| 4. Drehzahlanforderungen prüfen | Kontinuierliche Betriebsdrehzahl | Drehmoment-Drehzahl-Kurve |
| 5. Einschaltdauer bewerten | Laufzeit vs. Stillstandszeit | Thermische Belastbarkeit, Stromgrenze |
| 6. Umgebung berücksichtigen | Temperatur, Staub, Feuchtigkeit | IP-Schutzklasse, Isolationsklasse |
| 7. Treibersystem wählen | Spannung, Strom, Steuerschnittstelle | Treiberkompatibilität |
| 8. Sicherheitsreserve einplanen | 30–50 % Drehmomentreserve | Motorüberdimensionierung oder Getriebe |
Häufig gestellte Fragen (FAQs)
Was ist das grundlegende Funktionsprinzip eines Schrittmotors?
Ein Schrittmotor arbeitet, indem Statorwicklungen in einer präzisen Sequenz bestromt werden und so ein rotierendes Magnetfeld erzeugen. Der Permanentmagnet- oder Zahnrotor richtet sich bei jeder neuen Feldorientierung in diskreten Winkelbewegungen – sogenannten Schritten – aus.
Wie wird der Schrittwinkel eines Schrittmotors berechnet?
Der Schrittwinkel entspricht 360 Grad geteilt durch das Produkt aus Rotorzähnen und Phasenanzahl. Für Standard-Hybrid-Schrittmotoren mit 50 Rotorzähnen und 2 Phasen beträgt der Vollschrittwinkel 1,8° – das ergibt 200 Schritte pro Umdrehung.
Was ist der Unterschied zwischen Haltemoment und Laufmoment?
Das Haltemoment ist das maximale statische Drehmoment im Stillstand mit Nennstrom. Das Laufmoment (Kippmoment) ist das maximal verfügbare Drehmoment bei einer bestimmten Drehzahl, bevor der Motor stehen bleibt.
Kann Mikroschritt die Positioniergenauigkeit verbessern?
Mikroschritt verbessert die Laufruhe dramatisch und reduziert Vibration, bringt aber abnehmende Genauigkeitserträge jenseits von 16x–32x Mikroschritt. Die tatsächliche Positionsgenauigkeit wird durch Motorlinearität und Lastreibung begrenzt, nicht allein durch die Schrittunterteilung.
Warum verliert mein Schrittmotor Schritte unter Last?
Schrittverluste treten auf, wenn das Lastmoment das verfügbare Motordrehmoment bei der Betriebsdrehzahl übersteigt. Abhilfe: höhere Treiberspannung, moderatere Beschleunigungsraten oder ein größerer Motor.
Was ist der Vorteil eines 5-Phasen-Schrittmotors gegenüber einem 2-Phasen-Motor?
5-Phasen-Motoren bieten ruhigeren Lauf mit geringerer Drehmomentwelligkeit und höherer nativer Auflösung (0,72° oder 0,36° pro Vollschritt). Kompromiss: höhere Kosten und eingeschränktere Treiberverfügbarkeit.
Fazit
Das Schrittmotor Funktionsprinzip vereint elektromagnetische Präzision mit mechanischer Einfachheit, um wiederholbare, kontrollierbare Bewegungen zu liefern. Das Verständnis von Schrittwinkelberechnung, Phasenerregungsmodi und Drehmoment-Drehzahl-Verhalten macht die Motorauswahl von einer ratbasierten zu einer fundierten Ingenieursentscheidung.
Konzentrieren Sie sich bei der Bewertung von Schrittmotoren auf die Spezifikationen, die tatsächlich die reale Leistung bestimmen: Drehmoment bei Ihrer Betriebsdrehzahl (nicht nur Haltemoment), Spannungsreserve des Treibers für Hochdrehzahl-Anwendungen und die gegen den Laufruhebedarf abgewogene Phasenanzahl. Ein korrekt spezifiziertes Schrittmotor-Treiber-Paar liefert jahrelange zuverlässige Open-Loop-Positionierung.
Benötigen Sie Unterstützung bei der Auswahl der optimalen Schrittmotor-Treiber-Kombination für Ihre spezifische Anwendung? Unser Engineering-Team prüft Ihre Bewegungsanforderungen und empfiehlt eine abgestimmte Lösung. Jetzt Kontakt aufnehmen – für anwendungstechnische Beratung.