
Schrittmotoren gehören zu den am weitesten verbreiteten Motion-Control-Komponenten in der Industrieautomation, CNC-Bearbeitung, Robotik, Medizintechnik, Halbleitersystemen und Präzisionspositionieranwendungen. Anders als herkömmliche DC-Motoren bewegen sich Schrittmotoren in diskreten Winkelschritten und ermöglichen so eine präzise Open-Loop-Positionssteuerung – in vielen Anwendungen ohne Rückführungssysteme.
Das Verständnis der verschiedenen Schrittmotor Typen ist für Ingenieure unerlässlich, die Bewegungssysteme mit hoher Positionsgenauigkeit, Wiederholbarkeit, Langsamlauf-Drehmoment und kosteneffizienter Steuerungsarchitektur entwickeln.
Dieser Artikel ist Teil einer umfassenden Wissensreihe. Die zentrale Pillar Page finden Sie hier: Schrittmotor Grundlagen: Typen, Auswahl & OEM-Beschaffung. Für eine kompakte Einführung empfehlen wir zudem Wie funktioniert ein Schrittmotor? sowie den vertiefenden Leitfaden zum Schrittmotor Funktionsprinzip.
Die drei primären Schrittmotor-Technologien in der Industrie sind:
Permanentmagnet-Schrittmotoren (PM)
Variable-Reluktanz-Schrittmotoren (VR)
Hybrid-Schrittmotoren
Jede Technologie nutzt unterschiedliche elektromagnetische Funktionsprinzipien und bietet einzigartige Vorteile bei Drehmomenterzeugung, Positioniergenauigkeit, Effizienz, Drehzahlfähigkeit und Kosten.
Was sind die wichtigsten Schrittmotor Typen?
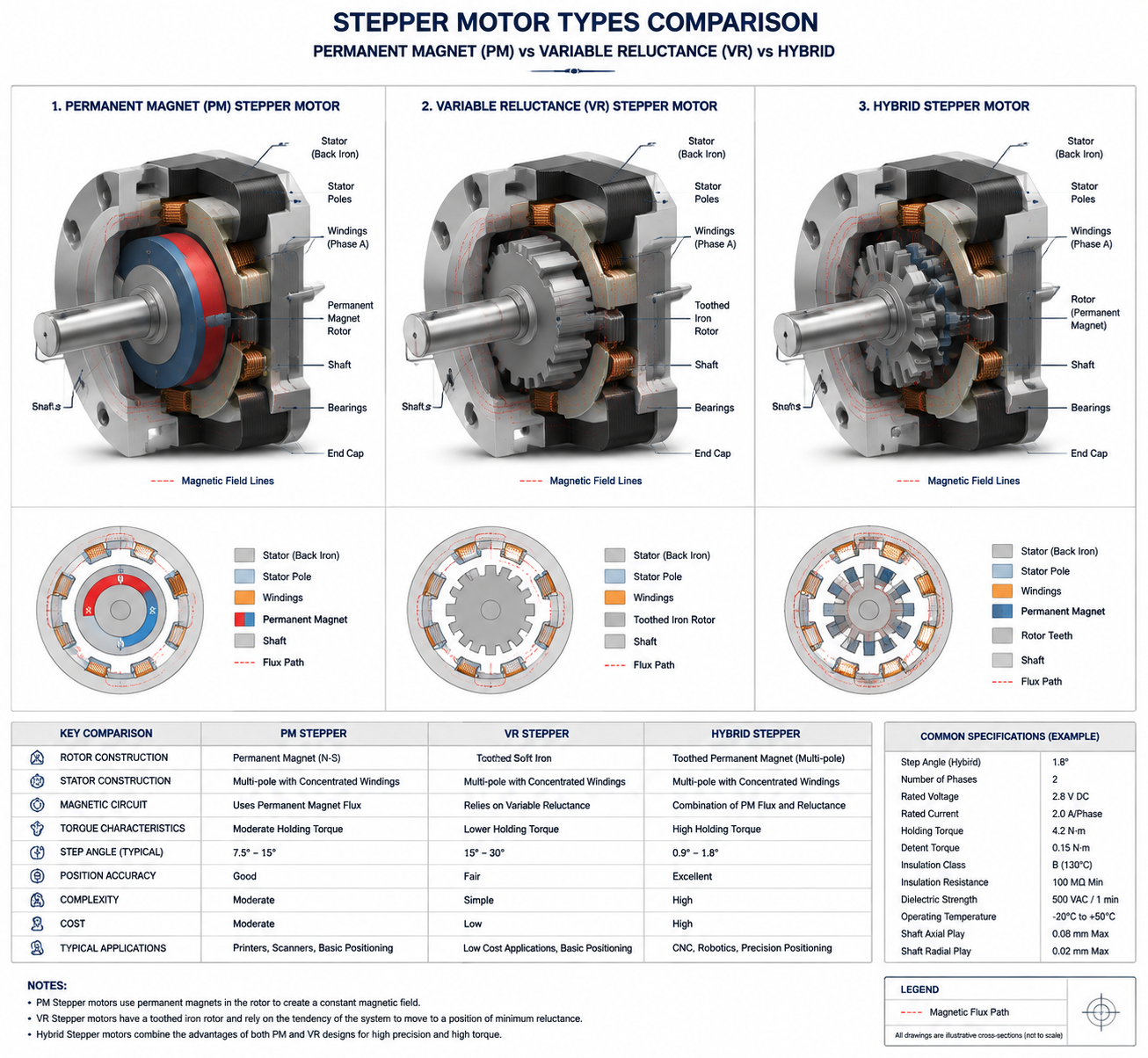
Schrittmotoren werden grundsätzlich nach Rotorkonstruktion und magnetischem Funktionsprinzip klassifiziert. Die drei Hauptkategorien sind:
| Schrittmotor Typ | Rotoraufbau | Positioniergenauigkeit | Typische Anwendungen |
|---|---|---|---|
| Permanentmagnet (PM) | Permanentmagnet-Rotor | Mittel | Consumer-Geräte, kostengünstige Automation |
| Variable Reluktanz (VR) | Weicheisen-Zahnrotor | Mittel bis Hoch | Hochgeschwindigkeits-Positionierung |
| Hybrid-Schrittmotor | Permanentmagnet + Zahnrotor | Hoch | CNC, Robotik, Industrieautomation |
Unter diesen Technologien hat sich der Hybrid-Schrittmotor aufgrund seiner überlegenen Drehmomentdichte, feinen Schrittgenauigkeit und exzellenten Positionierwiederholbarkeit als dominierende Lösung in der Industrieautomation etabliert.
Permanentmagnet-Schrittmotoren (PM)
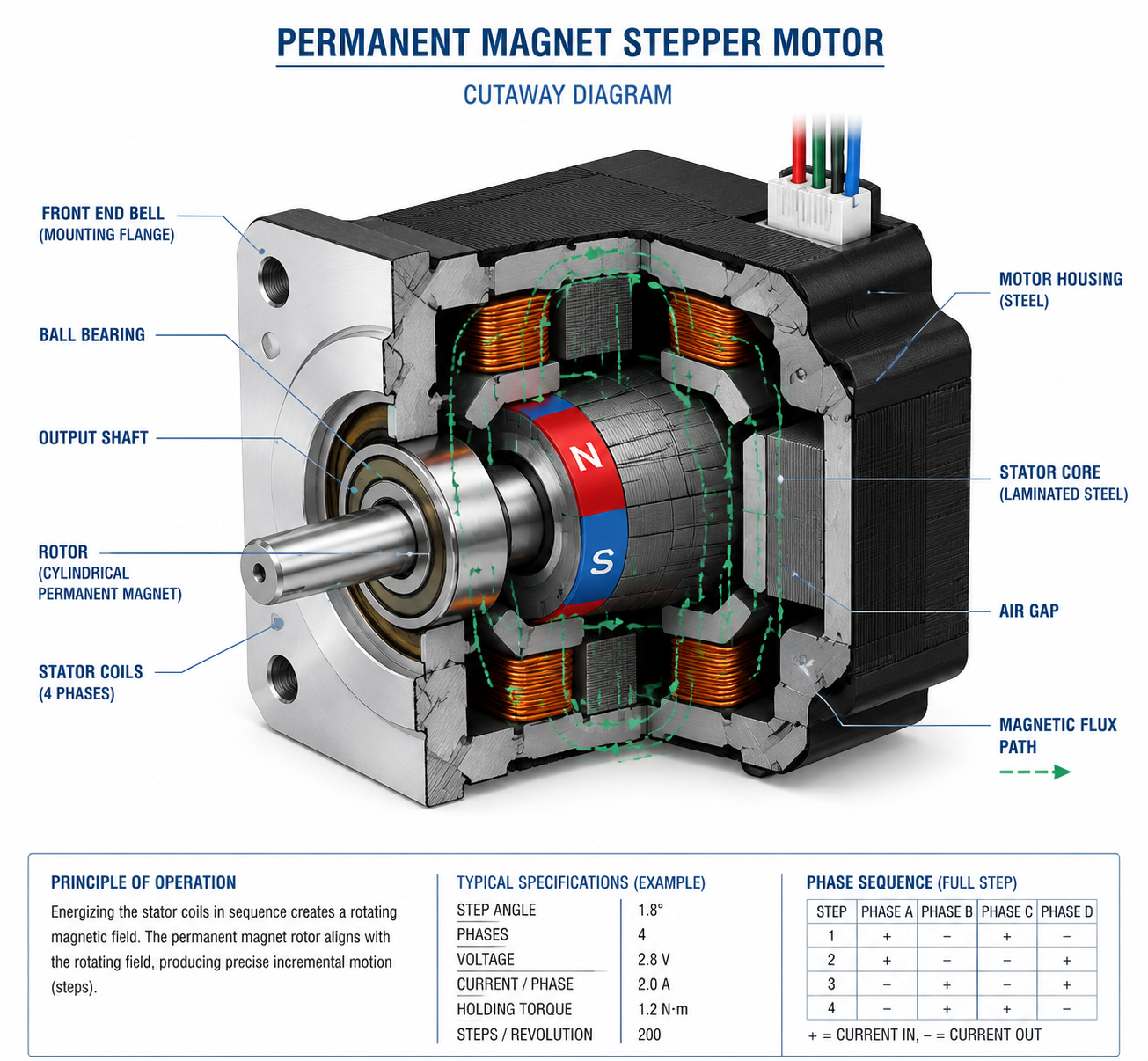
Funktionsprinzip der Permanentmagnet-Schrittmotoren
Ein Permanentmagnet-Schrittmotor verwendet einen Rotor aus permanentmagnetischem Material. Der Stator enthält elektromagnetische Wicklungen, die bei sequenzieller Bestromung durch den Motortreiber Magnetfelder erzeugen.
Werden die Statorphasen bestromt, richtet sich der Rotor am Magnetfeld der Statorpole aus. Die sequenzielle Erregung erzeugt eine inkrementelle Drehbewegung.
PM-Schrittmotoren verwenden typischerweise größere Schrittwinkel als Hybrid-Ausführungen:
7,5° pro Schritt
15° pro Schritt
18° pro Schritt
Aufgrund ihres relativ einfachen Aufbaus sind PM-Schrittmotoren wirtschaftlich und einfach zu fertigen.
Konstruktionsmerkmale
| Komponente | Beschreibung |
|---|---|
| Rotor | Zylindrischer Permanentmagnet |
| Stator | Elektromagnetische Pole mit Spulen |
| Lager | Standard-Radiallager |
| Ansteuerung | Sequenzielle Phasenerregung |
Eigenschaften von PM-Schrittmotoren
Vorteile:
Gutes Drehmoment bei niedrigen Drehzahlen
Einfache Steuerungsarchitektur
Niedrigere Herstellungskosten
Relativ leiser Betrieb
Gutes Haltemoment für kleine Systeme
Nachteile:
Größere Schrittwinkel reduzieren die Positionierauflösung
Geringere Drehmomentdichte als Hybrid-Motoren
Eingeschränktes Hochgeschwindigkeitsverhalten
Geringere dynamische Ansprechbarkeit
Typische industrielle Anwendungen
Drucker
Kleine medizinische Pumpen
Consumer-Elektronik
HVAC-Stellantriebe im Automobilbau
Büroautomation
Einfache Ventilsteuerungen
Variable-Reluktanz-Schrittmotoren (VR)
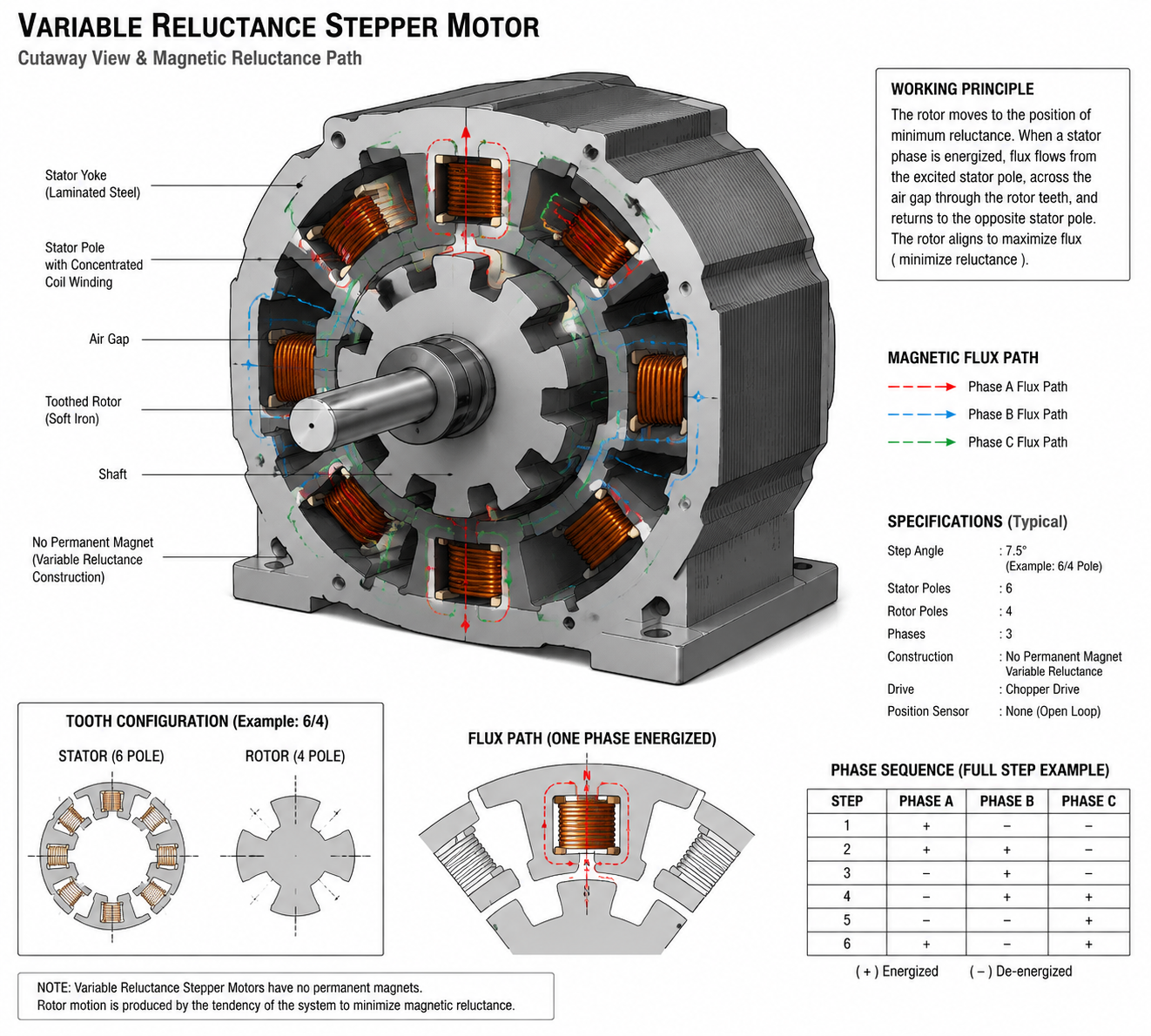
Funktionsprinzip der Variable-Reluktanz-Schrittmotoren
Ein Variable-Reluktanz-Schrittmotor arbeitet nach dem Prinzip des minimalen magnetischen Widerstands. Anders als PM-Motoren verwenden VR-Schrittmotoren einen Weicheisenrotor ohne Permanentmagnete. Der Rotor enthält mehrere Zähne, während der Stator bestrombare elektromagnetische Pole besitzt.
Wird eine Statorphase bestromt, richtet sich der Rotor automatisch entlang des magnetischen Pfades mit dem geringsten Widerstand aus. Die sequenzielle Erregung bewirkt eine schrittweise Rotation.
Konstruktionsmerkmale
| Komponente | Beschreibung |
|---|---|
| Rotor | Weicheisen-Zahnrotor |
| Magnet | Kein Permanentmagnet |
| Stator | Mehrpoliger Elektromagnetaufbau |
| Rotorträgheit | Sehr gering |
Eigenschaften von VR-Schrittmotoren
Vorteile:
Sehr schnelles Beschleunigungsvermögen
Niedrige Rotorträgheit
Hohe Schrittfrequenzen
Hervorragendes dynamisches Ansprechverhalten
Vereinfachter Rotoraufbau
Nachteile:
Niedriges Haltemoment
Geringeres Gesamtdrehmoment
Höhere Vibrationspegel
Reduziertes Drehmoment bei niedrigen Drehzahlen
Komplexes Magnetdesign
Typische Schrittwinkel
VR-Schrittmotoren erreichen je nach Zahngeometrie und Polkonfiguration:
5°
2°
1,8°
Typische industrielle Anwendungen
Hochgeschwindigkeits-Positioniersysteme
Leichtlast-Indexiermechanismen
Wissenschaftliche Instrumentierung
Optische Scangeräte
Spezialisierte Laborsysteme
Heute sind viele VR-Anwendungen aufgrund der besseren Drehmomentleistung und Steuerbarkeit auf Hybrid-Schrittmotoren umgestiegen.
Hybrid-Schrittmotoren
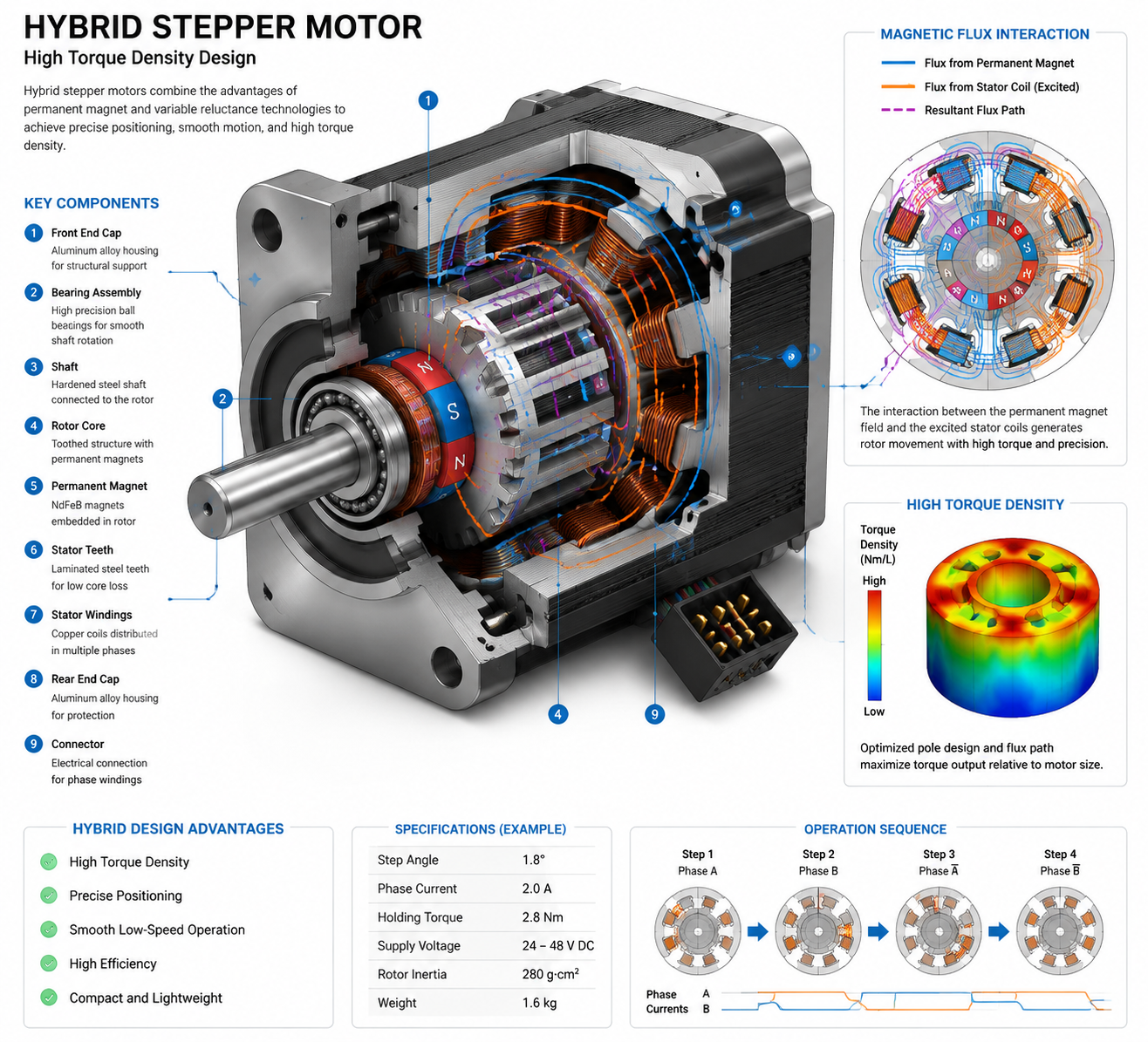
Funktionsprinzip der Hybrid-Schrittmotoren
Der Hybrid-Schrittmotor vereint die Funktionsprinzipien von Permanentmagnet- und Variable-Reluktanz-Schrittmotoren. Er verwendet:
Einen Permanentmagnet-Rotorkern
Präzisionsgefertigte Rotorzähne
Gezahnte Statorpole
Diese Konstruktion ermöglicht hohe magnetische Flussdichte, feine Positionierauflösung, exzellentes Haltemoment und ein hohes Drehmoment-Größen-Verhältnis. Der Rotor besteht meist aus zwei gezahnten Kappen, die axial mit entgegengesetzter Polarität magnetisiert sind. Der Zahnversatz zwischen den Rotorhälften erzeugt eine hochpräzise elektromagnetische Positionierung.
Warum Hybrid-Schrittmotoren anders sind
| Eigenschaft | Ursprungstechnologie |
|---|---|
| Permanentmagnetischer Fluss | PM-Schrittmotor |
| Feine Zahngeometrie | VR-Schrittmotor |
| Hohes Haltemoment | PM-Technologie |
| Hohe Positionierpräzision | VR-Technologie |
Schrittwinkel und Auflösung
Hybrid-Schrittmotoren erreichen üblicherweise:
1,8° (200 Schritte/Umdrehung)
0,9° (400 Schritte/Umdrehung)
0,72°
0,45°
Mit Mikroschritt-Treibern drastisch steigerbar:
| Mikroschritt-Modus | Effektive Auflösung |
|---|---|
| 1/2 Schritt | 400 Schritte/U |
| 1/8 Schritt | 1600 Schritte/U |
| 1/16 Schritt | 3200 Schritte/U |
| 1/256 Schritt | 51200 Schritte/U |
Gängige NEMA-Baugrößen
| NEMA-Größe | Typische Anwendungen |
|---|---|
| NEMA 8 | Medizintechnik, Optik |
| NEMA 11 | Kompakte Automationssysteme |
| NEMA 17 | 3D-Drucker, kleine CNC-Systeme |
| NEMA 23 | CNC-Fräsen, Robotik |
| NEMA 34 | Industrieautomationsmaschinen |
| NEMA 42 | Schwerlast-Antriebssysteme |
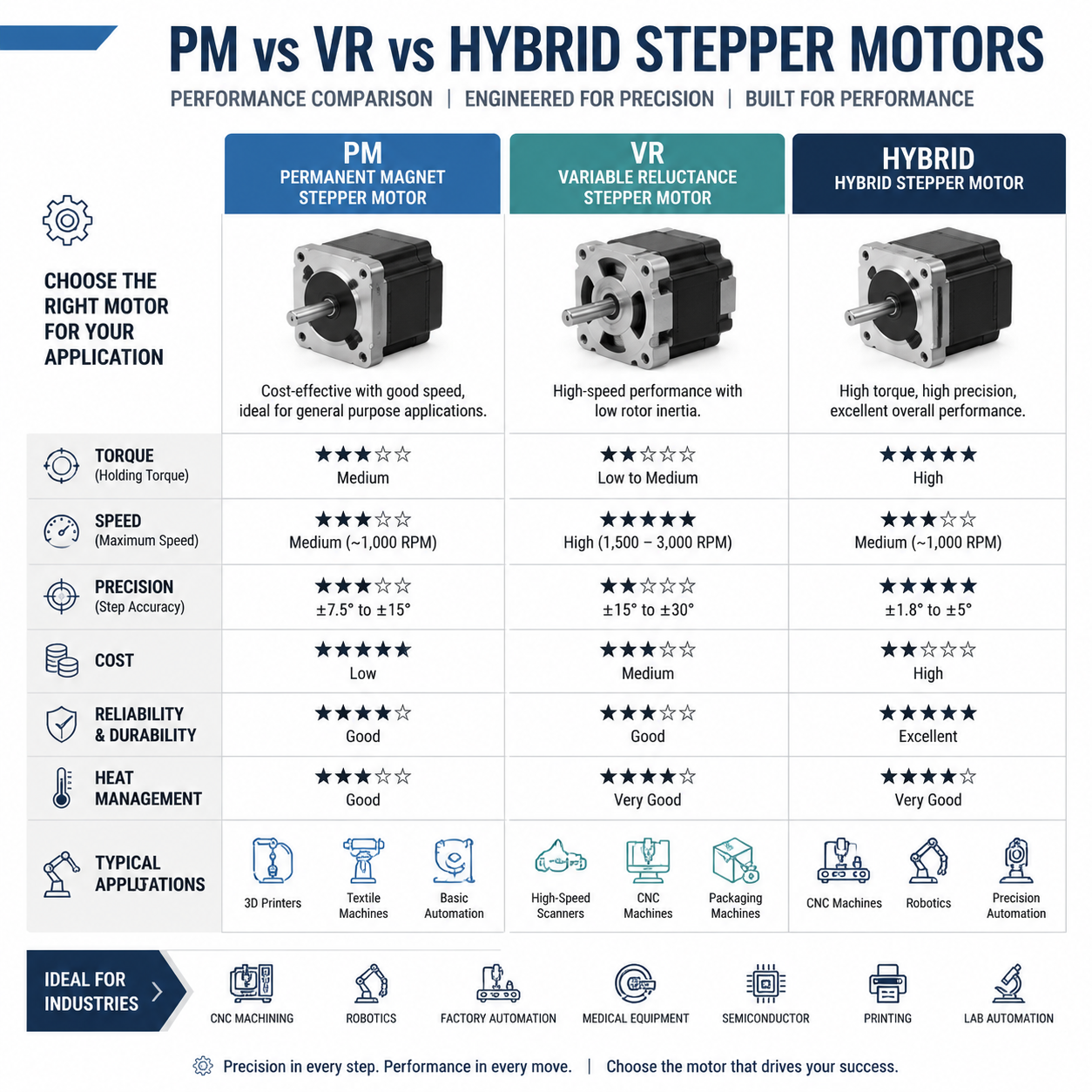
PM vs VR vs Hybrid Schrittmotor im Vergleich
Der folgende Schrittmotor Typen Vergleich fasst die wichtigsten technischen Unterschiede zwischen PM-, VR- und Hybrid-Technologien zusammen.
| Parameter | PM Schrittmotor | VR Schrittmotor | Hybrid Schrittmotor |
|---|---|---|---|
| Rotortyp | Permanentmagnet | Weicheisen-Zahnrotor | Magnet + Zahnrotor |
| Haltemoment | Mittel | Niedrig | Hoch |
| Positioniergenauigkeit | Mittel | Gut | Hervorragend |
| Schrittwinkel | 7,5°–18° | 1,8°–5° | 0,45°–1,8° |
| Rotorträgheit | Mittel | Sehr gering | Mittel |
| Drehmomentdichte | Mittel | Niedrig | Hoch |
| Hochgeschwindigkeit | Mittel | Hoch | Hoch |
| Kosten | Niedrig | Mittel | Höher |
| Typische Verwendung | Consumer-Produkte | Spezialisierte Positionierung | Industrieautomation |
Vor- und Nachteile der einzelnen Typen
Permanentmagnet Schrittmotor – Vorteile
Niedrige Herstellungskosten
Einfaches Design
Gutes Langsamlauf-Drehmoment
Einfache Steuerung
Kompakte Bauweise
Permanentmagnet Schrittmotor – Nachteile
Geringere Präzision
Größere Schrittwinkel
Begrenzte Hochgeschwindigkeitsleistung
Reduzierte Drehmomentdichte
Variable Reluktanz Schrittmotor – Vorteile
Geringe Rotorträgheit
Schnelle Beschleunigung
Hervorragendes dynamisches Ansprechverhalten
Einfacher Rotoraufbau
Variable Reluktanz Schrittmotor – Nachteile
Niedriges Haltemoment
Höhere Vibration
Geringere Effizienz
Begrenzte industrielle Verbreitung
Hybrid Schrittmotor – Vorteile
Hohe Drehmomentabgabe
Exzellente Positioniergenauigkeit
Feine Schrittauflösung
Hohe Wiederholgenauigkeit
Starke Langsamlauf-Leistung
Breite industrielle Kompatibilität
Hervorragende Mikroschritt-Performance
Hybrid Schrittmotor – Nachteile
Höhere Herstellungskosten
Komplexere Magnetstruktur
Erfordert optimierte Treiberabstimmung
Industrielle Anwendungen der verschiedenen Schrittmotor Typen
Consumer-Elektronik und Bürogeräte
PM-Schrittmotoren bleiben weit verbreitet in Druckern, Kopierern, Kamerasystemen, HVAC-Stellantrieben und Fahrkartenautomaten – geeignet für mittelpräzise Consumer-Produkte.
Wissenschaftliche und Hochgeschwindigkeits-Positioniersysteme
VR-Motoren werden gelegentlich für optische Scanner, Präzisions-Indexiertische, Forschungsinstrumentierung und Hochgeschwindigkeits-Aktuatorsysteme gewählt.
Industrieautomation und CNC-Bearbeitung
Hybrid-Schrittmotoren dominieren in CNC-Fräsen, 3D-Druckern, Industrierobotern, automatisierten Montagesystemen, Verpackungsmaschinen, Textilanlagen, Halbleiter-Fertigungssystemen und Laborautomation.

Warum Hybrid-Schrittmotoren die Industrieautomation dominieren
In modernen Automatisierungssystemen bevorzugen Ingenieure zunehmend Hybrid-Schrittmotoren, weil sie die beste Balance zwischen Drehmoment, Präzision, Kosten, Zuverlässigkeit und Steuerbarkeit bieten.
Höhere Drehmomentdichte
Hybrid-Motoren erzeugen deutlich mehr Drehmoment als PM- und VR-Ausführungen vergleichbarer Größe – OEMs können die Motorbaugröße reduzieren und dennoch die Leistung halten.
Überlegene Positioniergenauigkeit
Mit standardmäßigen 1,8°- oder 0,9°-Schrittwinkeln und modernen Mikroschritt-Treibern liefern Hybrid-Motoren präzise Motion Control für High-End-Automationssysteme.
Exzellentes Haltemoment
Industrielle Systeme erfordern häufig Positionshaltung unter statischer Last. Hybrid-Motoren bieten hervorragendes Haltemoment, ohne in vielen Anwendungen auf Closed-Loop-Servosysteme angewiesen zu sein.
Starke Kompatibilität mit digitalen Treibern
Moderne DSP-basierte Schrittmotortreiber verbessern signifikant: Bewegungsruhe, Resonanzunterdrückung, Mikroschritt-Genauigkeit, Stromregelungseffizienz und Geräuschreduzierung.
So wählen Sie den richtigen Schrittmotor Typ
Die Auswahl erfordert die Bewertung von Drehmomentanforderungen, Positioniergenauigkeit, Drehzahlbereich, Lastträgheit, Kostenrahmen, Umgebungsbedingungen und Einschaltdauer.
| Auswahlfaktor | Empfohlener Motortyp |
|---|---|
| Niedrigste Kosten | PM-Schrittmotor |
| Höchste Beschleunigung | VR-Schrittmotor |
| Höchste Drehmomentdichte | Hybrid-Schrittmotor |
| Höchste Präzision | Hybrid-Schrittmotor |
| Industrielle CNC-Systeme | Hybrid-Schrittmotor |
| Einfache Consumer-Produkte | PM-Schrittmotor |
Häufig gestellte Fragen (FAQs)
Was sind die wichtigsten Schrittmotor Typen?
Die drei Haupttypen sind Permanentmagnet (PM), Variable Reluktanz (VR) und Hybrid-Schrittmotoren. Sie unterscheiden sich in Rotorstruktur, Drehmomentverhalten, Positioniergenauigkeit und industrieller Anwendungseignung.
Was ist der Unterschied zwischen Hybrid- und PM-Schrittmotor?
Der primäre Unterschied liegt im Rotoraufbau. Hybrid-Motoren kombinieren Permanentmagnete mit gezahnter Rotorgeometrie und ermöglichen so höheres Drehmoment, feinere Schrittauflösung und bessere Positioniergenauigkeit als Standard-PM-Motoren.
Warum sind Hybrid-Schrittmotoren in der Industrieautomation beliebter?
Hybrid-Schrittmotoren bieten überlegene Drehmomentdichte, präzise Positionierung, exzellentes Haltemoment und starke Kompatibilität mit Mikroschritt-Treibern – ideal für CNC-Maschinen, Robotik und Präzisionsautomation.
Werden Variable-Reluktanz-Schrittmotoren heute noch eingesetzt?
Ja, aber sie sind weniger verbreitet als Hybrid-Ausführungen. VR-Motoren werden noch in spezialisierten Anwendungen verwendet, die geringe Trägheit und schnelle Beschleunigung erfordern.
Welcher Schrittmotor Typ bietet die höchste Präzision?
Hybrid-Schrittmotoren bieten die höchste Positionierpräzision aufgrund ihrer feinen Zahnrotorstruktur und kleineren Schrittwinkel.
Fazit
Das Verständnis der verschiedenen Schrittmotor Typen ist entscheidend für die Auswahl der richtigen Motion-Control-Lösung in industriellen Automatisierungssystemen.
Permanentmagnet-Schrittmotoren bieten wirtschaftliche Lösungen für kostengünstige Positionieranwendungen. Variable-Reluktanz-Motoren liefern schnelle Beschleunigung und niedrige Rotorträgheit für spezialisierte Systeme. Der Hybrid-Schrittmotor hat sich jedoch als dominierender Industriestandard etabliert, da er hohe Drehmomentdichte, feine Positionierauflösung, starkes Haltemoment und exzellente Steuerbarkeit vereint.
Für OEM-Maschinenhersteller, Robotik-Entwickler und Automatisierungsingenieure bieten Hybrid-Schrittmotoren die beste Gesamtbalance aus Leistung, Zuverlässigkeit und Kosteneffizienz.
Vertiefende Informationen finden Sie in unserer zentralen Pillar Page: Schrittmotor Grundlagen: Typen, Auswahl & OEM-Beschaffung.
Jetzt Kontakt aufnehmen – für eine unverbindliche technische Beratung zu Ihrem Schrittmotor-Projekt