
In modernen industriellen Automatisierungssystemen gehören Schrittmotoren nach wie vor zu den am häufigsten eingesetzten Motion-Control-Lösungen für präzise Positionierung, synchronisierte Indexierung und Open-Loop-Drehzahlregelung. Da CNC-Systeme, kollaborative Roboter, Halbleiterautomation, Verpackungsmaschinen und medizinische Geräte zunehmend höhere Positionierpräzision und bessere Dynamikleistung fordern, vergleichen Ingenieure in der OEM-Designphase verstärkt Hybrid Schrittmotor vs Permanentmagnet Schrittmotor Technologien.
Dieser Artikel ist Teil einer umfassenden Wissensreihe. Die zentrale Pillar Page finden Sie hier: Schrittmotor Grundlagen: Typen, Auswahl & OEM-Beschaffung. Ergänzend empfehlen wir Wie funktioniert ein Schrittmotor?, den Leitfaden zum Schrittmotor Funktionsprinzip sowie den umfassenden Schrittmotor Typen Vergleich.
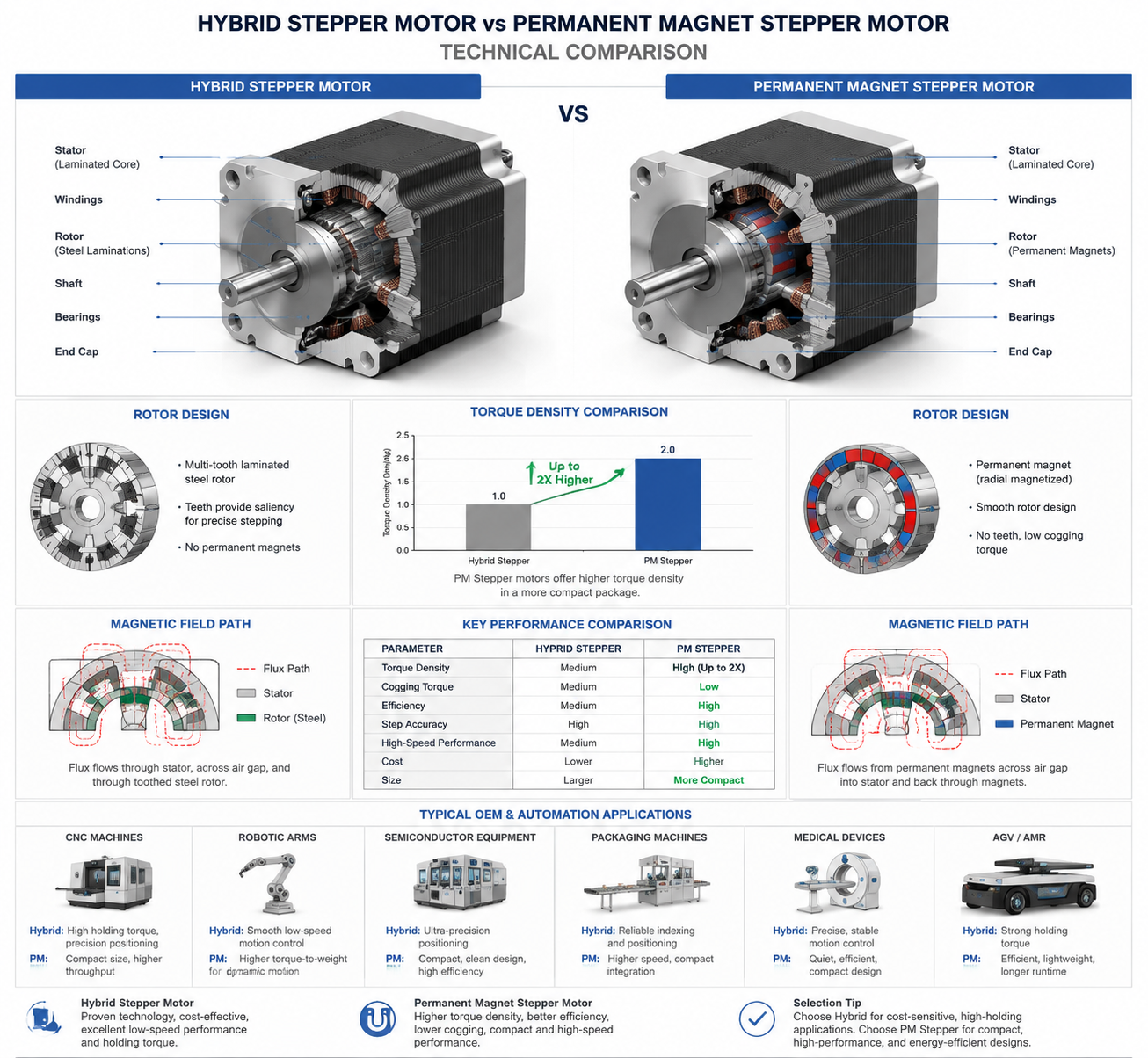
Permanentmagnet-Schrittmotoren werden häufig in kostengünstigen Positionieranwendungen eingesetzt, bei denen moderates Drehmoment und einfache Steuerung ausreichen. Hybrid-Schrittmotoren hingegen dominieren die Industrieautomation aufgrund ihrer höheren Drehmomentdichte, feineren Schrittauflösung, überlegenen Dynamik und verbesserten Positionierwiederholbarkeit.
Dieser technische Leitfaden bietet einen detaillierten Vergleich auf Engineering-Niveau, der Industriedesignern hilft, die optimale Bewegungsplattform für ihre Automatisierungsausrüstung auszuwählen.
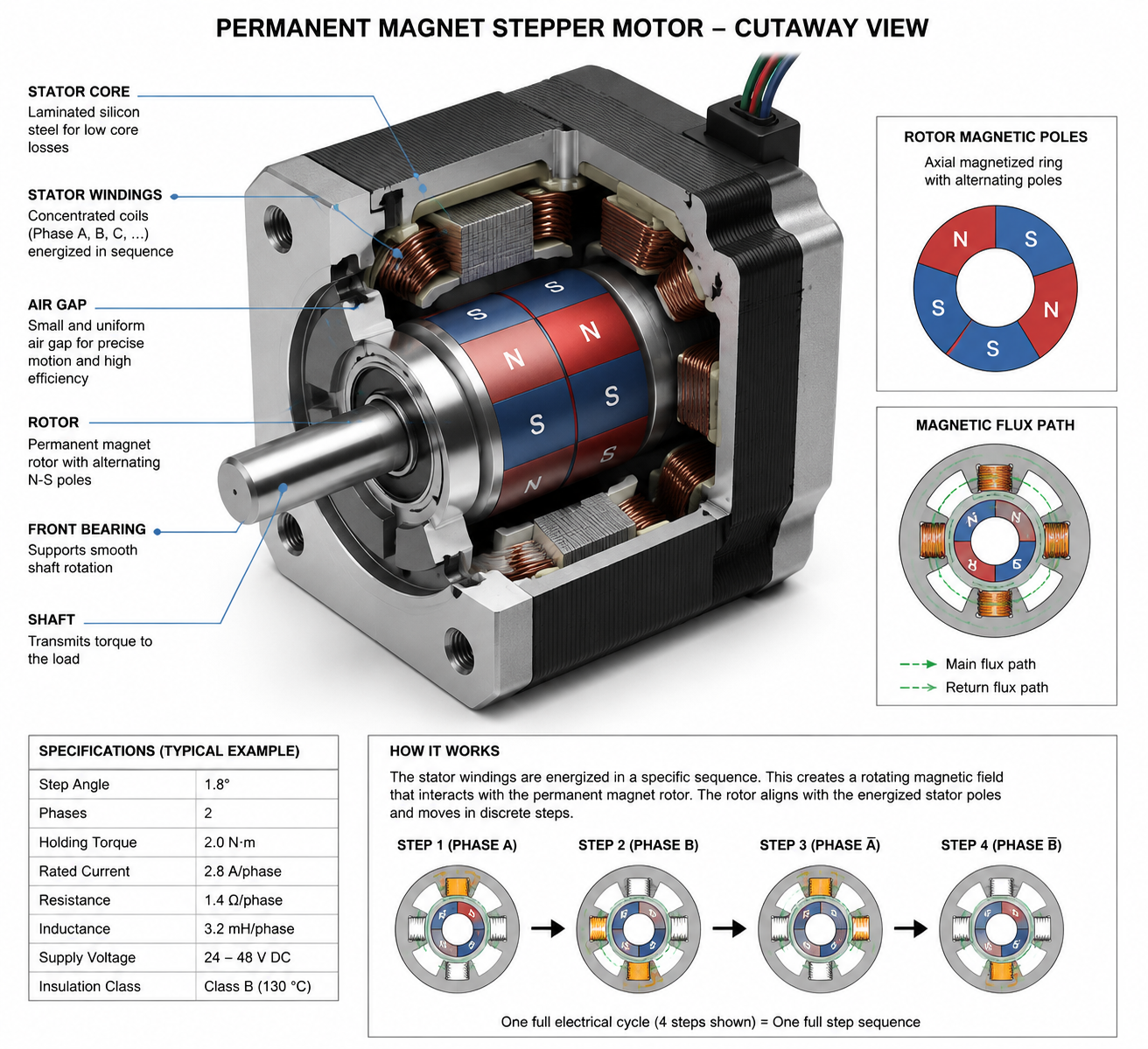
Was ist ein Permanentmagnet (PM) Schrittmotor?
Ein Permanentmagnet-Schrittmotor verwendet einen Rotor aus permanentmagnetischem Material anstelle von lamellierten Stahlzähnen. Der Rotor enthält typischerweise abwechselnde magnetische Nord- und Südpole. Der Stator besitzt mehrere elektromagnetische Wicklungen, die in Phasen angeordnet sind und sequenziell bestromt werden, um das Magnetfeld zu drehen.
Werden die Statorwicklungen bestromt, bewirken magnetische Anziehungs- und Abstoßungskräfte, dass sich der Rotor am aktiven Magnetfeld ausrichtet. Jede Umschaltsequenz bewegt den Rotor um einen festen Winkelschritt – den Schrittwinkel.
PM Schrittmotor Aufbau
Die meisten Permanentmagnet-Schrittmotoren verwenden:
Einfache magnetische Polstrukturen im Rotor
Niedrigere Phasenzahlen
Größere Schrittwinkel
Geringere Fertigungskomplexität
Reduzierte magnetische Flusskonzentration
Funktionsprinzip
Die Drehmomenterzeugung in PM-Schrittmotoren resultiert primär aus der Wechselwirkung zwischen dem elektromagnetischen Statorfeld und dem magnetischen Rotorfeld. PM-Motoren behalten auch im unbestromten Zustand ein Rastmoment, da die Rotormagnetpole mit den Statorzähnen interagieren.
Vorteile der Permanentmagnet-Schrittmotoren
Niedrige Herstellungskosten
Einfacher Rotoraufbau
Gutes Langsamlauf-Drehmoment
Rastmoment ohne Bestromung
Kompaktes Design für Consumer-Anwendungen
Reduzierte Treiberkomplexität
Nachteile der PM-Schrittmotoren
Größere Schrittwinkel (7,5°–18°)
Geringere Positioniergenauigkeit
Begrenzte Hochgeschwindigkeitsleistung
Höhere Drehmomentwelligkeit
Reduzierte Mikroschritt-Laufruhe
Geringere Drehmomentdichte
Typische PM-Anwendungen
Büroautomation
Consumer-Elektronik
HVAC-Stellantriebe (Automobil)
Kleine Pumpen und Ventile
Medizinische Dosiersysteme (Basis)
Kostengünstige Positioniersysteme
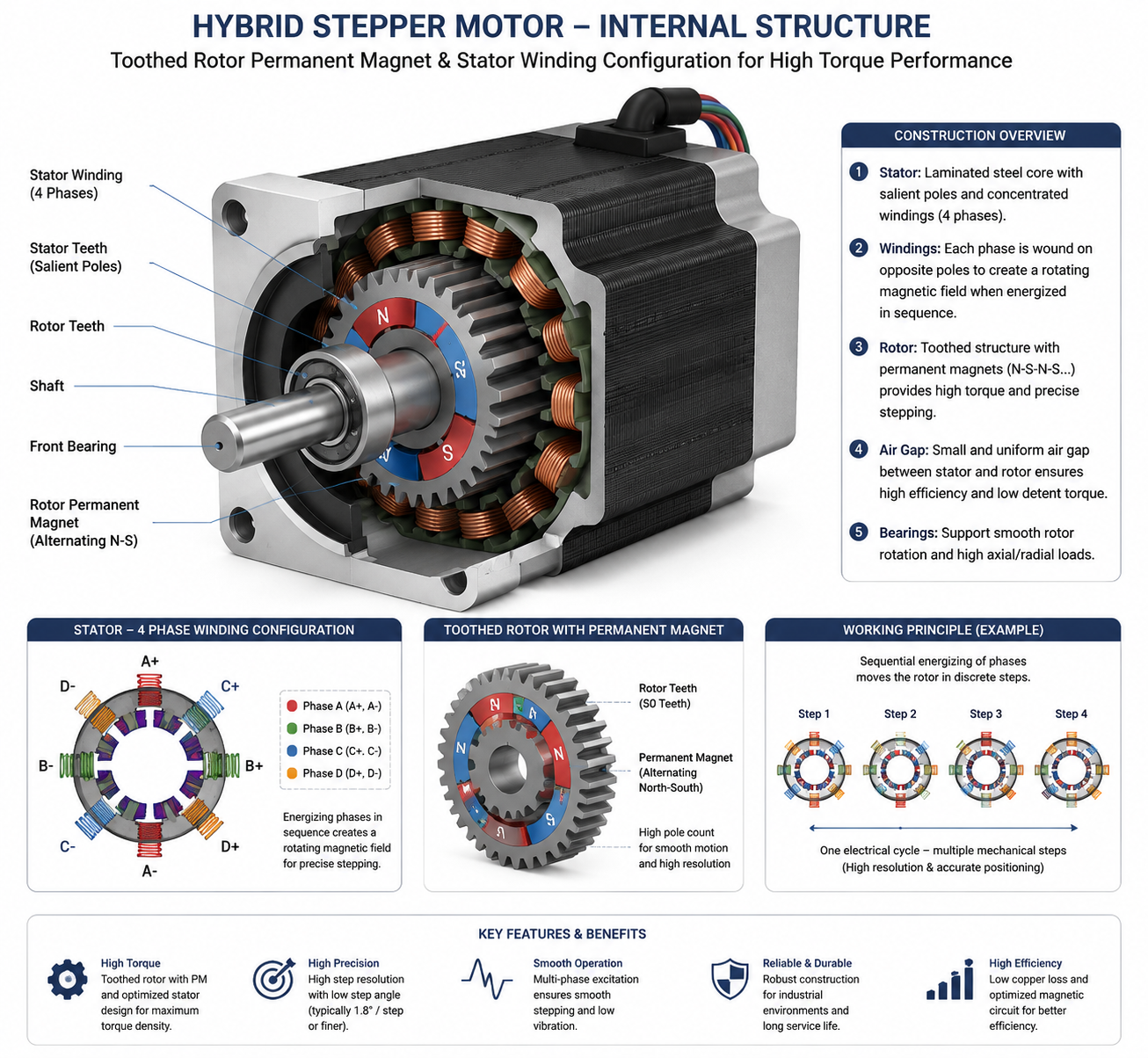
Was ist ein Hybrid-Schrittmotor?
Ein Hybrid-Schrittmotor kombiniert die Funktionsprinzipien von Permanentmagnet- und Reluktanz-Technologie. Diese Hybrid-Architektur integriert einen Permanentmagnet-Rotorkern mit präzisionsgefertigten Rotorzahnlamellen, um eine signifikant höhere Drehmomentdichte und feinere Positionierauflösung zu erreichen.
Hybrid Schrittmotor Aufbau
Der Rotor besteht aus:
Axial magnetisiertem Permanentmagnetkern
Zwei gezahnten Rotorkappen
Versetzter Rotorzahngeometrie
Präzisionslamelliertem Magnetstahl
Die Rotorzähne sind mechanisch um eine halbe Zahnteilung versetzt und ermöglichen so sehr feine Schrittinkremente bei Wechselwirkung mit dem Statormagnetfeld.
Typische Hybrid-Schrittmotoren erreichen:
1,8° Schrittwinkel
0,9° hochauflösende Varianten
Hohe Mikroschritt-Linearität
Hohes Drehmoment-Volumen-Verhältnis
Kombination aus PM- und Reluktanzprinzip
Bei Hybrid-Schrittmotoren wird das Drehmoment sowohl durch permanentmagnetische Anziehung als auch durch Reluktanz-Ausrichtungskräfte erzeugt. Der magnetische Kreis konzentriert den Fluss durch die feinen Rotorzähne, was die Drehmomentdichte und Positionierpräzision im Vergleich zu PM-Schrittmotoren drastisch erhöht.
Vorteile der Hybrid-Schrittmotoren
Hohe Drehmomentabgabe
Exzellente Positionierwiederholbarkeit
Feine Schrittauflösung
Starkes Haltemoment bei Stillstand
Verbesserte Mikroschritt-Laufruhe
Bessere CNC-Bewegungsperformance
Überlegene Dynamikantwort
Industrietaugliche Zuverlässigkeit
Industrielle Hybrid-Anwendungen
CNC-Maschinen
Halbleiterautomation
Industrierobotik
Verpackungsmaschinen
Medizinische Bildgebung
Präzisionsinspektionsplattformen
Linearaktuatorsysteme
Strukturelle Unterschiede zwischen PM- und Hybrid-Schrittmotoren
Der primäre technische Unterschied liegt in der Rotorgeometrie und der magnetischen Flusskontrolle. PM-Motoren nutzen hauptsächlich direkte Magnetpol-Wechselwirkung, während Hybrid-Motoren präzise Zahnstrukturen verwenden, um die magnetische Reluktanz zu modulieren und die Drehmomentausbeute zu steigern.
| Strukturparameter | PM Schrittmotor | Hybrid Schrittmotor |
|---|---|---|
| Rotortyp | Permanentmagnet-Zylinder | Gezahnter Magnetrotor |
| Rotorzähne | Meist nicht vorhanden | Feine Präzisionszähne |
| Magnetflusspfad | Vereinfacht | Konzentrierter Magnetkreis |
| Schrittauflösung | Niedriger | Hochpräzise |
| Rotorfertigung | Einfach | Komplexe Präzisionsbearbeitung |
Magnetkreis und Drehmomenterzeugung im Vergleich
In PM-Schrittmotoren wird das Drehmoment primär durch direkte Anziehung zwischen Statormagnetfeld und Permanentmagnet-Rotorpolen erzeugt. Die Drehmomentkurve ist tendenziell weniger linear, mit größerer Drehmomentwelligkeit und schwächerer Flusskonzentration.
In Hybrid-Schrittmotoren wird der Magnetkreis durch die gezahnte Rotorausrichtung deutlich effizienter. Die Rotorzähne kanalisieren den Magnetfluss durch lokalisierte Pfade mit niedrigem magnetischem Widerstand und erhöhen so die magnetische Feldstärke und Drehmomentdichte.
| Drehmoment-Charakteristik | PM Schrittmotor | Hybrid Schrittmotor |
|---|---|---|
| Drehmomentdichte | Mittel | Hoch |
| Haltemoment | Niedriger | Signifikant höher |
| Drehmomentwelligkeit | Höher | Mit Mikroschritt reduziert |
| Magnetflusseffizienz | Mittel | Hoch |
| Dynamische Drehmomentstabilität | Begrenzt | Hervorragend |
Schrittwinkel und Positioniergenauigkeit
PM-Schrittmotoren verwenden üblicherweise größere Schrittwinkel wie 7,5°, 15° oder 18°.
Hybrid-Schrittmotoren arbeiten typischerweise mit:
1,8° pro Schritt
0,9° pro Schritt
Mikroschritt-Unterteilung bis zu 256 Mikroschritten
| Präzisionsparameter | PM Schrittmotor | Hybrid Schrittmotor |
|---|---|---|
| Typischer Schrittwinkel | 7,5° bis 18° | 1,8° oder 0,9° |
| Positioniergenauigkeit | Mittel | Hochpräzise |
| Mikroschritt-Fähigkeit | Begrenzt | Hervorragend |
| Bewegungsruhe | Mittel | Sehr ruhig |
Drehmomentdichte und Drehzahlverhalten
Hybrid-Motoren erzielen durch optimierte Magnetflusspfade und feine Rotorzähne ein höheres Drehmoment bei gleicher Baugröße. Dies ermöglicht:
Höhere Beschleunigungsraten
Verbesserte Belastbarkeit
Bessere Steifigkeit bei niedrigen Drehzahlen
Reduziertes Schrittverlust-Risiko
| Leistungsparameter | PM Schrittmotor | Hybrid Schrittmotor |
|---|---|---|
| Drehmomentdichte | Mittel | Hoch |
| Hochgeschwindigkeit | Begrenzt | Bessere Dynamik |
| Resonanzverhalten | Ausgeprägter | Leichter kontrollierbar |
| Beschleunigung | Mittel | Hervorragend |
Thermische Leistung und Effizienz
PM-Schrittmotoren arbeiten im Allgemeinen mit geringeren Stromdichten und niedrigerem Haltemoment, was zu reduzierter thermischer Belastung unter leichten Betriebsbedingungen führt. Ihre geringere Effizienz bedeutet jedoch mehr Energieverlust im Verhältnis zur nutzbaren Drehmomentabgabe.
Hybrid-Schrittmotoren können aufgrund höherer Stromanforderungen und höherer magnetischer Flussdichte mehr Wärmeenergie erzeugen. Ihre überlegene Drehmomenteffizienz bedeutet jedoch mehr mechanische Arbeit pro Volumeneinheit.
Industrielle Hybrid-Schrittmotoren verfügen oft über:
Optimierte Statorlamellierung
Hochtemperatur-Isolationssysteme
Verlustarmen Magnetstahl
Verbesserte Wärmeleitpfade
Präzisionswickeltechniken
Kosten und Fertigungskomplexität
| Fertigungsfaktor | PM Schrittmotor | Hybrid Schrittmotor |
|---|---|---|
| Produktionskomplexität | Niedrig | Hoch |
| Rotor-Präzisionsbearbeitung | Einfach | Präzisionstechnisch anspruchsvoll |
| Materialkosten | Niedriger | Höher |
| Industrielle Eignung | Entry-Level-Systeme | Industrieautomation |
Industrielle Anwendungen im Vergleich
| Industrielle Anwendung | Bevorzugter Motortyp | Technische Begründung |
|---|---|---|
| CNC-Maschinen | Hybrid | Hohe Präzision und Drehmomentstabilität |
| Industrierobotik | Hybrid | Dynamische Antwort und Mikroschritt |
| Verpackungsmaschinen | Hybrid | Wiederholbarkeit und Synchronisierung |
| Medizingeräte | Hybrid | Präzise Dosierung und Positionierung |
| Consumer-Elektronik | PM | Niedrigere Kosten und kompakter Aufbau |
| Halbleiterautomation | Hybrid | Ultrapräzise Positioniersteuerung |
Welchen Motor sollten OEM-Entwickler wählen?
PM-Schrittmotoren wählen, wenn:
Kostensenstitivität entscheidend ist
Präzisionsanforderungen moderat sind
Bewegungsgeschwindigkeit relativ niedrig ist
Kompakte Consumer-Produkte anvisiert werden
Die Lastträgheit begrenzt ist
Hybrid-Schrittmotoren wählen, wenn:
Hohe Positioniergenauigkeit gefordert ist
Industrielle Zuverlässigkeit essenziell ist
Hohe Drehmomentdichte notwendig ist
CNC-Interpolation involviert ist
Dynamische Beschleunigung kritisch ist
Mikroschritt-Laufruhe relevant ist
| OEM-Anforderung | Empfohlener Motor | Entscheidungslogik |
|---|---|---|
| Kostengünstige Automation | PM Schrittmotor | Geringere Produktionskosten |
| CNC-Bewegungsplattform | Hybrid Schrittmotor | Bessere Präzision und Drehmoment |
| Medizinische Präzisionsgeräte | Hybrid Schrittmotor | Stabile Mikro-Positionierung |
| Consumer-Produkt-Bewegung | PM Schrittmotor | Kompakt und wirtschaftlich |
Zukunftstrends in der Schrittmotortechnologie
Closed-Loop-Hybrid-Schrittmotorsysteme
Integrieren Encoder mit DSP-basierten Servoregelalgorithmen und verbessern so Antiresonanz-Regelung, Drehmomentnutzung, thermische Effizienz und Hochgeschwindigkeitsstabilität.
Fortschrittliche Magnetmaterialien
Neue Seltene-Erden-Magnetmaterialien und verlustarme Statorlamellierungen verbessern die magnetische Flussdichte bei gleichzeitiger Reduzierung von Kernverlusten und Wärmeentwicklung.
Integrierte Bewegungsplattformen
Moderne Automatisierungssysteme integrieren Motor, Treiber, Encoder, Kommunikationsbus und intelligente Diagnose in kompakte Motion-Module.
Häufig gestellte Fragen (FAQs)
Was ist der Hauptunterschied zwischen einem Hybrid- und einem PM-Schrittmotor?
Der primäre Unterschied liegt in der Rotorstruktur. PM-Motoren verwenden Permanentmagnetpole ohne feine Zähne, während Hybrid-Motoren Permanentmagnete mit präzisen Rotorzahnlamellen für höhere Drehmomentdichte und feinere Genauigkeit kombinieren.
Warum werden Hybrid-Schrittmotoren in CNC-Maschinen eingesetzt?
Hybrid-Motoren bieten bessere Drehmomentstabilität, feinere Schrittauflösung, verbesserte Mikroschritt-Laufruhe und höhere Positioniergenauigkeit – ideal für CNC-Interpolation und Präzisionsbearbeitung.
Sind PM-Schrittmotoren günstiger als Hybrid-Schrittmotoren?
Ja. PM-Motoren verwenden einfachere Rotorstrukturen und geringere Fertigungskomplexität, was zu niedrigeren Produktionskosten führt.
Welcher Motor bietet die bessere Positioniergenauigkeit?
Hybrid-Schrittmotoren bieten eine signifikant höhere Positioniergenauigkeit aufgrund ihrer feinen Rotorzahngeometrie und kleineren Schrittwinkel.
Erzeugen Hybrid-Schrittmotoren mehr Wärme?
Hybrid-Motoren können aufgrund höherer Drehmomentfähigkeit und Stromdichte höhere thermische Lasten erzeugen, ihre Drehmomenteffizienz ist jedoch in industriellen Anwendungen wesentlich besser.
Fazit
Der technische Vergleich von Hybrid Schrittmotor vs Permanentmagnet Schrittmotor zeigt, dass jede Motorarchitektur unterschiedlichen industriellen Anforderungen dient.
Permanentmagnet-Schrittmotoren bieten eine praktische, kostengünstige Lösung für Positionieranwendungen mit moderater Präzision, bei denen Einfachheit und Wirtschaftlichkeit priorisiert werden.
Hybrid-Schrittmotoren dominieren jedoch die Industrieautomation aufgrund ihrer überlegenen Drehmomentdichte, feinen Positionierfähigkeit, sanfteren Mikroschritt-Verhaltens und besseren Dynamikantwort.
Für CNC-Systeme, Robotik, Halbleiterautomation, Verpackungsmaschinen und medizinische Präzisionsgeräte bleiben Hybrid-Schrittmotoren die bevorzugte OEM-Bewegungsplattform.
Vertiefende Informationen finden Sie in unserer zentralen Pillar Page: Schrittmotor Grundlagen: Typen, Auswahl & OEM-Beschaffung.