
Die Phasenanzahl ist einer dieser Parameter, die man im Datenblatt schnell überblättert – bis man mitten im OEM-Maschinenbau steckt und die Entscheidung plötzlich reale Konsequenzen hat. Wer schon einmal erlebt hat, wie ein 2-Phasen-Motor bei 8 Hz einen Förderrahmen auseinandervibriert, oder gesehen hat, wie ein 5-Phasen-System in einem Wafer-Handler Submikrometer-Positionierung hält, weiß, warum das Thema relevant ist.
Dieser Artikel gehört zu einer technischen Reihe. Die zentrale Übersicht finden Sie in den Schrittmotor Grundlagen: Typen, Auswahl & OEM. Ergänzend: Wie funktioniert ein Schrittmotor?, das Schrittmotor Funktionsprinzip, der Schrittmotor Typen Vergleich, Hybrid vs Permanentmagnet Schrittmotor und der Schrittwinkel: 1,8° vs 0,9°.
Wir arbeiten hier die elektromagnetischen und mechanischen Unterschiede zwischen 2-Phasen-, 3-Phasen- und 5-Phasen-Schrittmotoren durch – nicht als Produktvergleich, sondern als technische Analyse, wann welche Konfiguration Sinn ergibt und warum.
Was bedeutet „Phase" bei einem Schrittmotor?
Eine Phase bei einem Schrittmotor ist eine unabhängig bestromte Wicklungsgruppe. Fließt Strom durch eine Phase, entsteht ein magnetischer Flussvektor, der die Rotorzähne in Ausrichtung zieht. Das sequenzielle Durchschalten mehrerer Phasen lässt diesen Flussvektor um den Stator rotieren und zieht den Rotor in diskreten Winkelschritten mit.
Die Anzahl der Phasen bestimmt, wie viele unterscheidbare Flusspositionen es pro elektrischem Zyklus gibt. Mehr Phasen bedeuten mehr Zwischenpositionen des Flusses – das übersetzt sich direkt in feinere Drehmomentübergänge und ruhigeren Rotorlauf. Es beeinflusst auch, wie abrupt das Magnetfeld während der Kommutierung umspringt – ein entscheidender Faktor für Vibrations- und Resonanzverhalten.
2-Phasen-Schrittmotoren
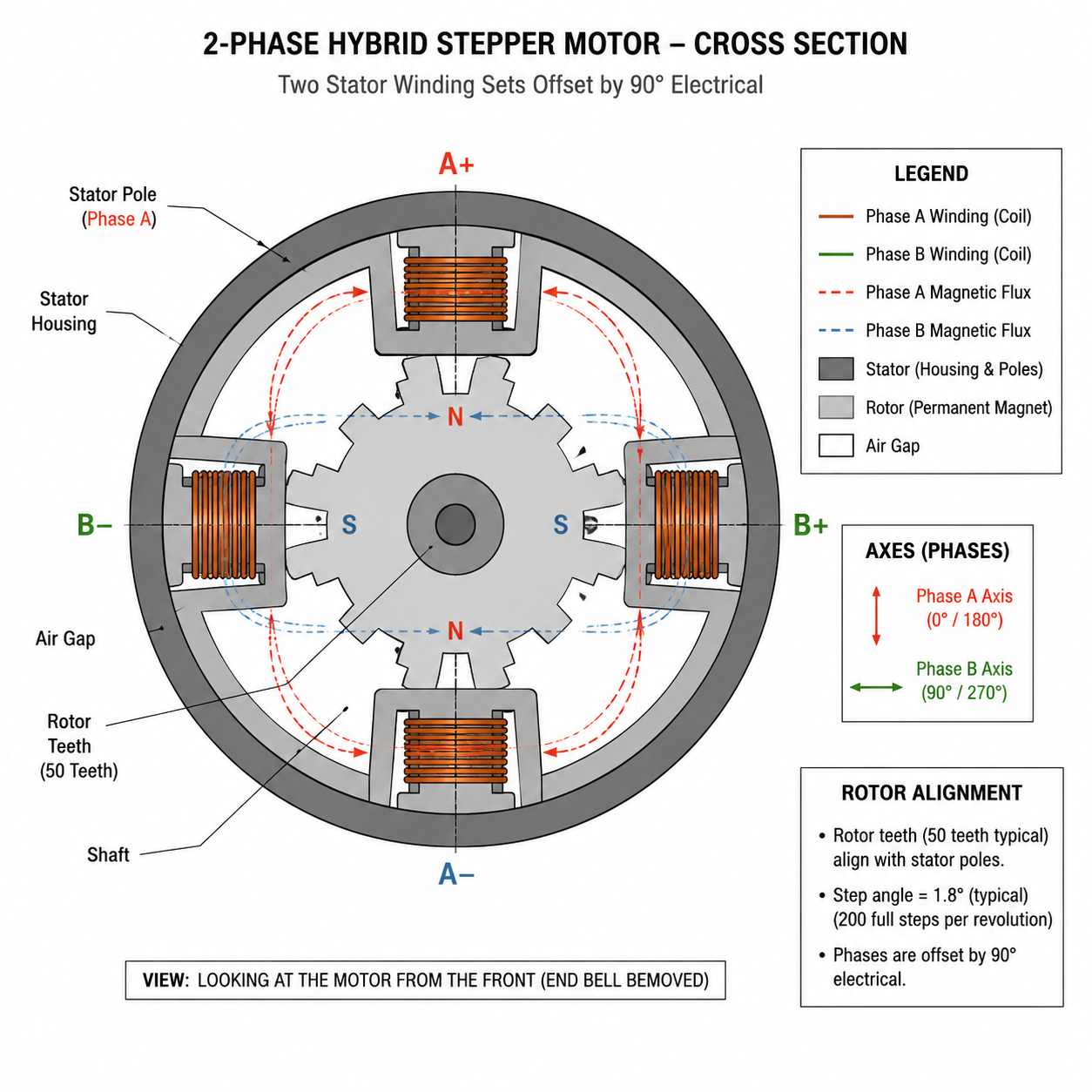
Der 2-Phasen-Hybrid-Schrittmotor ist das Arbeitstier der Industrieautomation. Zwei Wicklungssätze, 90 elektrische Grad versetzt, angesteuert in einer Vier-Schritt-Vollschritt- oder Acht-Schritt-Halbschritt-Sequenz. Einfach, günstig, gut verstanden.
Der standardmäßige 1,8°-Schrittwinkel (200 Schritte/U) ergibt sich aus einem 50-zähnigen Rotor in Kombination mit der 4-poligen 2-Phasen-Statorkonfiguration. Treiber gibt es überall – von einfachen L298-H-Brücken-Chips bis zu hochentwickelten DSP-basierten Mikroschritt-Treibern mit Stromregelbandbreiten über 10 kHz.
Wo 2-Phasen-Motoren Probleme bekommen, ist die Drehmomentwelligkeit. Im Vollschrittbetrieb kann die Welligkeit 30 % des Spitzendrehmoments überschreiten. Selbst mit sinusförmigem Mikroschritt erzeugt die zweiphasige Stromkurve eine Drehmomentabgabe, die theoretisch konstant sein sollte – in der Praxis machen Wicklungsinduktivität und EMK-Verzerrung diesen Idealfall zunichte. Realistisch sieht man 5–15 % Drehmomentwelligkeit, selbst mit guten Mikroschritt-Treibern.
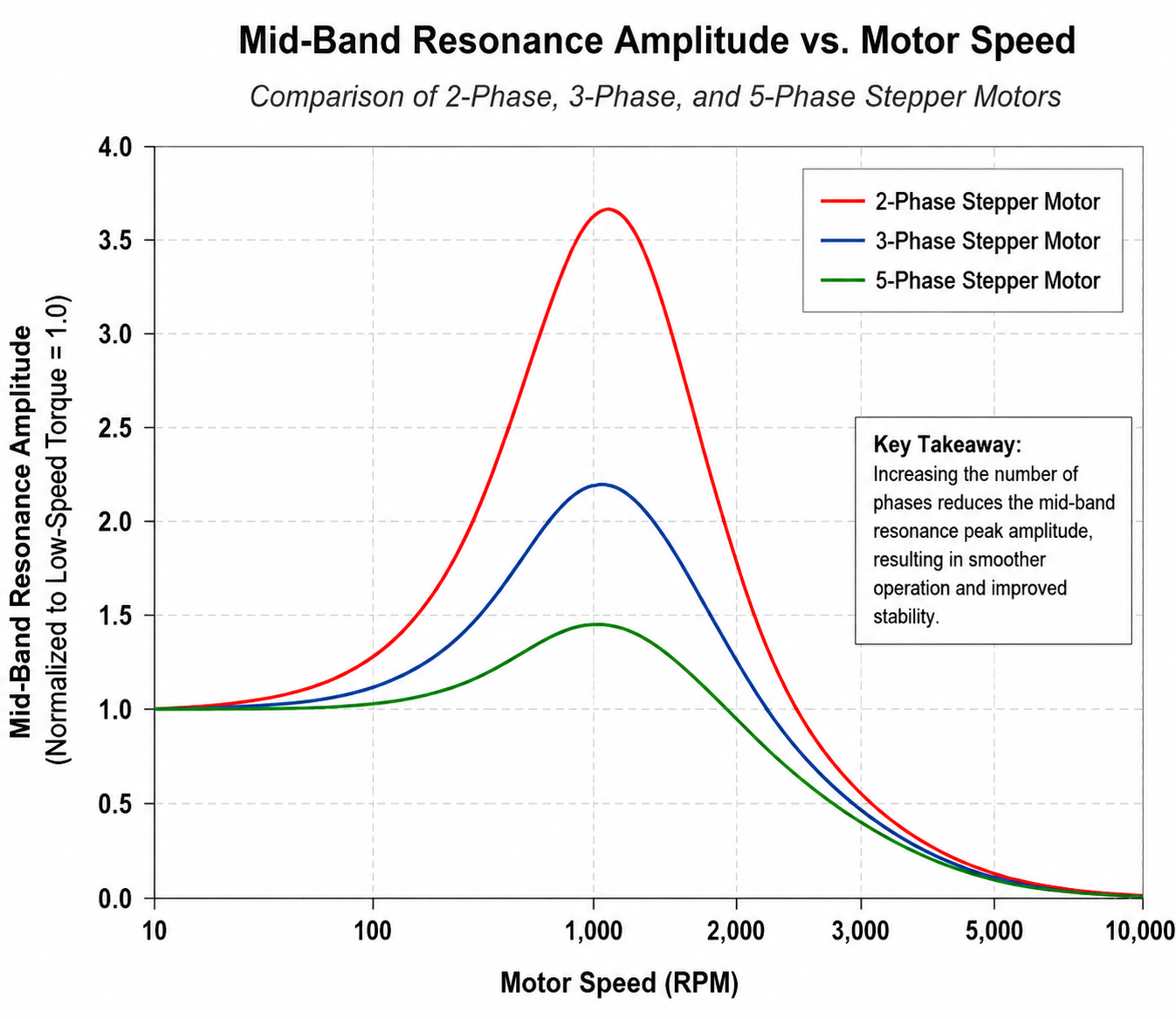
Das zweite Thema ist die Mid-Band-Resonanz. Bei bestimmten Drehzahlen – typischerweise 100–300 U/min, abhängig von Rotorträgheit und Last – fällt die Eigenfrequenz des Rotors mit der Schrittanregungsfrequenz zusammen. Das Ergebnis ist heftige Vibration, manchmal stark genug, um den Motor komplett zu blockieren. Das ist eine strukturelle Eigenschaft des 2-Phasen-Erregungsmusters, kein Treiberdefizit. Antiresonanz-Algorithmen in modernen Treibern helfen, aber sie eliminieren nicht die zugrunde liegende Physik.
Trotzdem: Für die Mehrheit der industriellen Anwendungen – allgemeine CNC-Achsen, Verpackungs-Indexierer, Etikettierer, einfache Pick-and-Place-Systeme – sind 2-Phasen-Motoren völlig angemessen. Das Ökosystem ist ausgereift, Ersatzteile sind weltweit verfügbar, und die Kosten pro Newtonmeter sind schwer zu schlagen.
3-Phasen-Schrittmotoren
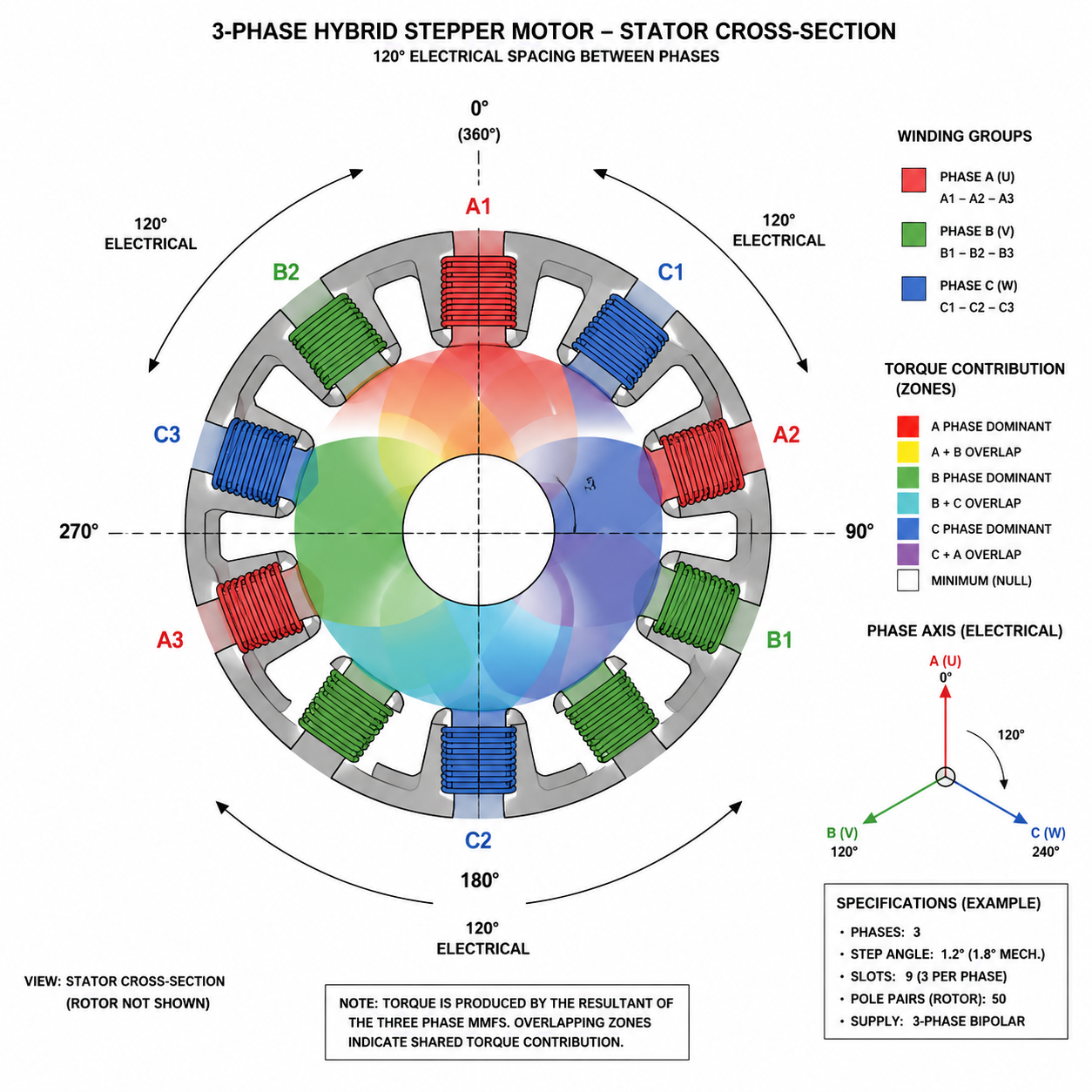
Dreiphasige Schrittmotoren wenden dieselbe elektromagnetische Logik an wie dreiphasige AC-Induktionsmotoren: drei Wicklungen, 120 elektrische Grad versetzt, in einer Sechs-Schritt-Sequenz angesteuert. Der Flussvektor rotiert kontinuierlicher als bei einem 2-Phasen-System, was messbare Auswirkungen auf Drehmomentqualität und Vibration hat.
Die Reduzierung der Drehmomentwelligkeit ist real. Mit drei Phasen überlappen sich die Drehmomentbeiträge jeder Wicklung gleichmäßiger. Die theoretische Drehmomentwelligkeit bei sinusförmiger 3-Phasen-Erregung sinkt auf etwa 13 % des 2-Phasen-Werts unter idealen Bedingungen. In der Praxis liegen Sie bei 3–8 % Welligkeit mit einem vernünftigen Treiber – spürbar ruhiger als ein vergleichbares 2-Phasen-System.
Auch die Drehzahlstabilität verbessert sich. Die kontinuierlichere Flussrotation reduziert die abrupten magnetischen Übergänge, die Rotorschwingungen anregen. Die Mid-Band-Resonanz verschwindet nicht, aber die Resonanzspitze ist niedriger in der Amplitude und leichter mit Closed-Loop- oder Antiresonanz-Kompensation zu unterdrücken.
Thermisch verteilen 3-Phasen-Motoren die Wärme gleichmäßiger auf drei statt zwei Wicklungen. Bei hohen Einschaltdauern ist das relevant – man kann einen 3-Phasen-Motor härter fahren, bevor die thermischen Grenzen erreicht werden. Das zählt bei Dauerlauf-Anwendungen wie Förderantrieben oder Rundtakt-Indexiertischen.
Der Zielkonflikt ist die Treiberkomplexität. Dreiphasen-Schrittmotortreiber benötigen eine 3-Phasen-H-Brücken-Topologie (sechs Schalter statt vier bei 2-Phasen), und die Kommutierungslogik ist aufwendiger. Der Treiber-Kostenaufschlag gegenüber 2-Phasen ist real, hat sich aber deutlich verringert, seit 3-Phasen-Motor-Treiber-Pakete im europäischen und asiatischen OEM-Markt üblicher geworden sind.
5-Phasen-Schrittmotoren
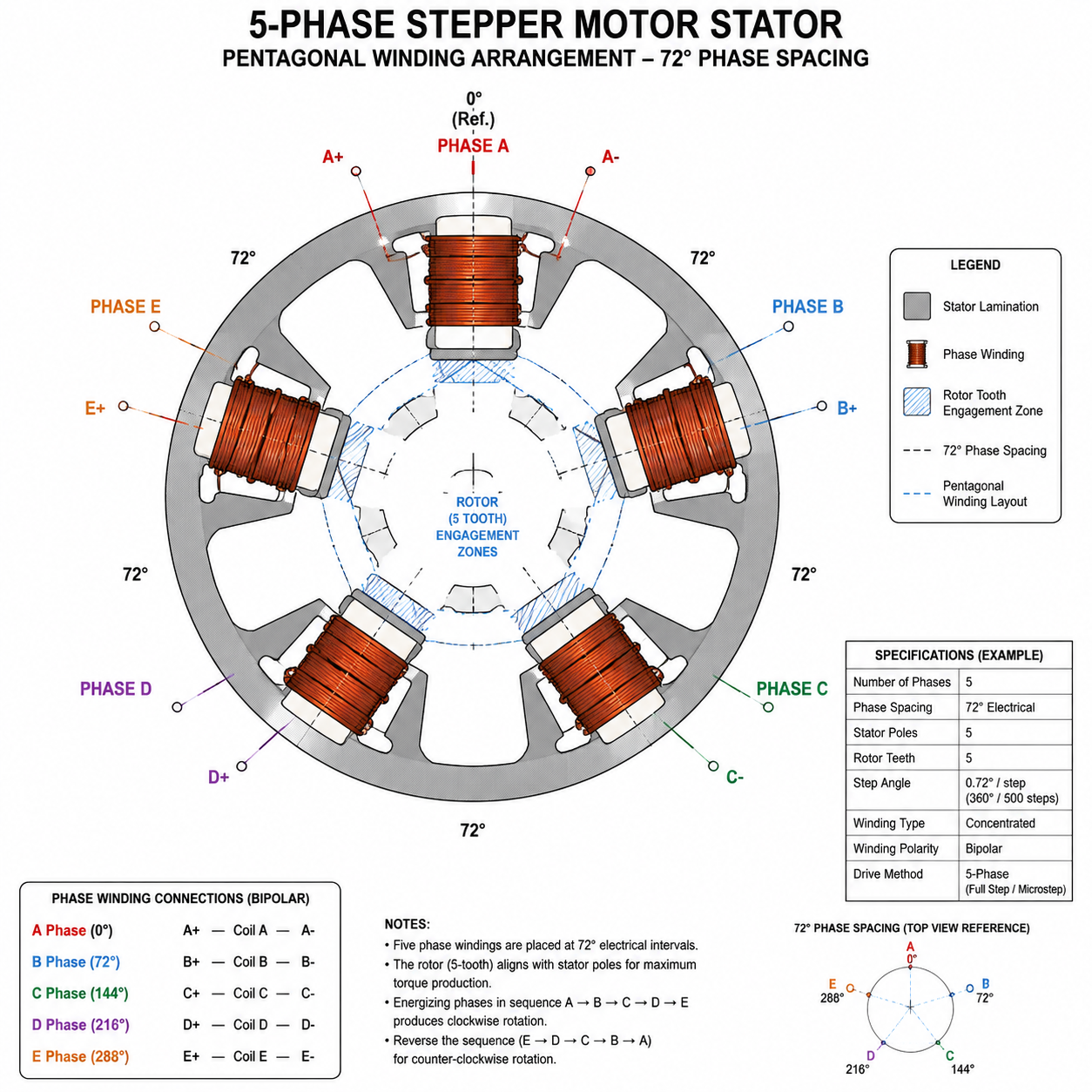
Fünfphasen-Schrittmotoren sind eine andere Maschinenkategorie. Der Stator hat fünf Wicklungssätze im Abstand von 72 elektrischen Grad, und der Standard-Schrittwinkel sinkt auf 0,72° – 500 Schritte pro Umdrehung im Vollschrittbetrieb. Das ist die 2,5-fache native Auflösung eines 2-Phasen-Motors, vor jeglichem Mikroschritt.
Das elektromagnetische Verhalten ist grundlegend ruhiger. Mit fünf Phasen, die in einem pentagonalen Erregungsmuster aktiv sind, sind die Flussvektorübergänge klein und nahezu kontinuierlich. Die Drehmomentwelligkeit liegt bei einem gut angesteuerten 5-Phasen-System typischerweise unter 3 % – eine Größenordnung besser als im 2-Phasen-Vollschrittbetrieb. Wichtiger noch: Die Resonanzcharakteristik ist dramatisch anders. Die Resonanzfrequenz verschiebt sich nach oben, und die Amplitude ist deutlich geringer. Deshalb sind 5-Phasen-Motoren Standard in der Halbleiter-Wafer-Handhabung, bei optischen Ausrichtungstischen und in Präzisions-Dosieranlagen, wo Vibration bei jeder Frequenz inakzeptabel ist.
Die Positioniergenauigkeit profitiert direkt vom feineren Schrittwinkel. Selbst ohne Mikroschritt erzeugen 0,72°-Schritte ruhigere Bewegungsprofile und reduzieren den Positionsfehlerbeitrag aus der Schritt-zu-Schritt-Variation. In einer Kugelgewindespindel-Linearachse mit 5 mm Steigung bewegt jeder Vollschritt 10 µm – praxistauglich für viele Präzisionsanwendungen ohne Encoder-Rückführung.
Das Kosten- und Komplexitätsbild ist signifikant. Fünfphasen-Treiber sind teurer, weniger universell verfügbar, und die Wicklungskonfiguration erfordert sorgfältige Beachtung der Phasensequenzierung. Die Fehlersuche an einem 5-Phasen-System im Feld ist schwieriger als an einem 2-Phasen-System. Für hochvolumige OEM-Ausrüstung, bei der die Bewegungsperformance die Investition rechtfertigt, lohnt es sich. Für eine Allzweck-Werkzeugmaschinenachse in der Regel nicht.
Struktureller Vergleich
| Parameter | 2-Phasen | 3-Phasen | 5-Phasen |
|---|---|---|---|
| Wicklungssätze | 2 | 3 | 5 |
| Elektrischer Phasenversatz | 90° | 120° | 72° |
| Standard Vollschrittwinkel | 1,8° | 1,2° | 0,72° |
| Schritte pro Umdrehung (Vollschritt) | 200 | 300 | 500 |
| Treiber-Schalteranzahl | 4 | 6 | 10 |
| Relative Treiberkosten | Niedrig | Mittel | Hoch |
| Thermische Verteilung | Moderat | Gut | Hervorragend |
Drehmomentwelligkeit und Bewegungsruhe
Drehmomentwelligkeit ist die periodische Schwankung des Ausgangsdrehmoments, während der Rotor einen elektrischen Zyklus durchläuft. Sie ist die Hauptquelle für Geschwindigkeitswelligkeit in Open-Loop-Schrittmotorsystemen und ein wesentlicher Beitrag zu akustischem Lärm und mechanischem Verschleiß in Präzisionsgeräten.
| Konfiguration | Vollschritt-Welligkeit | Mikroschritt-Welligkeit (typisch) | Geschwindigkeitsruhe |
|---|---|---|---|
| 2-Phasen | 25–35 % | 5–15 % | Moderat |
| 3-Phasen | 10–18 % | 3–8 % | Gut |
| 5-Phasen | 4–8 % | 1–3 % | Hervorragend |
Eins noch: Mikroschritt reduziert die Drehmomentwelligkeit, eliminiert sie aber nicht. Die Wicklungsinduktivität sorgt dafür, dass der tatsächliche Stromverlauf vom idealen Sinus abweicht, besonders bei höheren Drehzahlen, wo die Spannungsreserve des Treibers schrumpft. Ein 5-Phasen-Motor mit einem mittelmäßigen Treiber wird in puncto Laufruhe einen 2-Phasen-Motor mit einem guten Treiber übertreffen – der Phasenanzahl-Vorteil ist strukturell, nicht nur ein Treiberartefakt.
Resonanz- und Vibrationsanalyse
Mid-Band-Resonanz ist die praktisch störendste Eigenschaft des Open-Loop-Schrittmotorbetriebs. Sie tritt auf, wenn die Schrittanregungsfrequenz mit der Eigenfrequenz des Rotors um einen stabilen Gleichgewichtspunkt zusammenfällt. Bei Resonanz vibriert der Rotor nicht nur – er kann die Synchronisation vollständig verlieren.
Die Resonanzfrequenz hängt von Rotorträgheit, Lastträgheit und der Haltemoment-Steifigkeit des Motors ab. Für einen typischen NEMA-23-2-Phasen-Motor mit moderater Last liegt dieser Bereich bei 80–200 U/min. Bei 5-Phasen-Motoren verschiebt die höhere Schrittzahl und die weicheren Flussübergänge die primäre Resonanzfrequenz nach oben und reduziert die Amplitude erheblich.
| Konfiguration | Primärer Resonanzbereich | Resonanzamplitude | Unterdrückungsaufwand |
|---|---|---|---|
| 2-Phasen | 80–250 U/min | Hoch | Erfordert aktive Kompensation |
| 3-Phasen | 120–300 U/min | Mittel | Moderat – oft beherrschbar |
| 5-Phasen | 200–500 U/min | Niedrig | Minimal – oft selbstunterdrückend |
Die Stromkurvenqualität spielt hier eine wesentliche Rolle. Ein Treiber, der ein sauberes sinusförmiges Stromprofil erzeugt, reduziert den Oberwellengehalt im Drehmomentausgang, was direkt die Anregungsenergie reduziert, die zur Aufrechterhaltung der Resonanz zur Verfügung steht. Deshalb zählt die Stromregelbandbreite – ein Treiber mit 5 kHz Bandbreite folgt der Sinusreferenz deutlich genauer als einer mit 500 Hz, und der Vibrationsunterschied ist hör- und messbar.
Schrittwinkel und Positioniergenauigkeit
| Konfiguration | Vollschrittwinkel | Halbschrittwinkel | Typische Schrittgenauigkeit | Wiederholbarkeit (Open Loop) |
|---|---|---|---|---|
| 2-Phasen | 1,8° | 0,9° | ±5 % des Schrittwinkels | ±0,09° |
| 3-Phasen | 1,2° | 0,6° | ±5 % des Schrittwinkels | ±0,06° |
| 5-Phasen | 0,72° | 0,36° | ±3 % des Schrittwinkels | ±0,02° |
Die ±5 %-Angabe zur Schrittgenauigkeit ist nicht kumulativ – sie addiert sich nicht über mehrere Schritte. Aber in einem System, das auf Open-Loop-Positionierung angewiesen ist, begrenzt der Fehler pro Schritt direkt die erreichbare Genauigkeit. Der kleinere Schrittwinkel des 5-Phasen-Motors bedeutet, dass der absolute Winkelfehler pro Schritt selbst bei gleicher prozentualer Toleranz kleiner ist.
Treiberkomplexität und Steuerungssysteme
Zweiphasen-Treiber sind so einfach, dass kompetente Ingenieure sie aus diskreten Bauteilen aufbauen. Die Steuerlogik ist eine Zustandsmaschine mit vier Zuständen. Mikroschritt fügt einen DAC und eine Stromregelung hinzu, aber die Architektur ist gut dokumentiert und die Chips sind billig.
Dreiphasen-Schrittmotortreiber übernehmen viel von der BLDC-Motortreiber-Architektur. Die Sechs-Schalter-Brückentopologie ist identisch; der Unterschied liegt in der Kommutierungstabelle und der Stromreferenzerzeugung. Manche 3-Phasen-Schrittmotortreiber sind tatsächlich modifizierte BLDC-Treiber mit schrittmotorspezifischer Firmware. Diese Kreuzkompatibilität ist nützlich für OEM-Entwickler, die Treiberhardware über Motortypen hinweg standardisieren wollen.
Fünfphasen-Treiber sind spezialisierte Hardware. Die Zehn-Schalter-Brücke erfordert sorgfältiges Totzeit-Management, und die pentagonale Stromkurvenerzeugung ist rechenaufwendiger. Der Treiberkostenaufschlag gegenüber 2-Phasen beträgt typischerweise das 2- bis 4-Fache. Bei Großserien-Produktionsanlagen wird das von Anfang an in die Stückliste einkonstruiert. Für Kleinserien- oder Prototypensysteme ist es eine signifikante Hürde.
Industrielle Anwendungen im Vergleich
| Anwendung | Empfohlene Konfiguration | Hauptgrund |
|---|---|---|
| CNC-Fräse / Plasmaschneiden | 2-Phasen | Kosten, Verfügbarkeit, ausreichende Leistung |
| CNC-Fräsen (Präzision) | 3-Phasen oder 5-Phasen | Reduzierte Vibration, bessere Oberflächengüte |
| Industrierobotik (Gelenkantrieb) | 2-Phasen oder 3-Phasen | Drehmomentdichte, Drehzahlbereich |
| Halbleiter-Wafer-Handling | 5-Phasen | Vibrationsempfindlichkeit, Positioniergenauigkeit |
| Verpackungsmaschinen | 2-Phasen | Kosten, globale Ersatzteilverfügbarkeit |
| Medizinische Dosierung / Laborautomation | 5-Phasen | Ruhiger Lauf, geringe Vibration, Genauigkeit |
| Optische Ausrichtungstische | 5-Phasen | Sub-Bogenminuten-Positionierung, minimale Resonanz |
| Fördertechnik / Materialhandling | 2-Phasen oder 3-Phasen | Thermische Dauerlaufleistung |
Welche Phasenkonfiguration sollten OEM-Entwickler wählen?
Die ehrliche Antwort: Man fängt mit 2-Phasen an, es sei denn, man hat einen spezifischen Grund, es nicht zu tun. Das Ökosystem ist ausgereift, die Lieferkette global, und für die Mehrheit der industriellen Bewegungsaufgaben ist ein gut abgestimmtes 2-Phasen-System mit einem ordentlichen Mikroschritt-Treiber völlig ausreichend.
Man geht zu 3-Phasen, wenn vom Bediener Vibrationsbeschwerden kommen, wenn die Oberflächengüte bearbeiteter Teile unter motorinduzierter Geschwindigkeitswelligkeit leidet oder wenn Dauerlauf-Zyklen die thermischen Grenzen der 2-Phasen-Wicklungen ausreizen. Der Kostenaufschlag ist moderat, die Leistungsverbesserung real.
5-Phasen spezifiziert man, wenn die Anwendung es wirklich verlangt: Halbleiterausrüstung, optische Präzisionssysteme, Medizinrobotik – jede Anwendung, bei der Vibration bei irgendeiner Frequenz ein Problem ist und Positioniergenauigkeit unter 0,1° zählt. Man sollte 5-Phasen nicht einsetzen, um ein Problem zu lösen, das besserer Mikroschritt oder mechanische Dämpfung billiger beheben würde.
Die Trägheitsanpassung verdient hier noch einen Hinweis. Unabhängig von der Phasenanzahl wird ein Motor, der eine Last mit dem 10-Fachen seiner eigenen Rotorträgheit antreibt, ein schlechtes Dynamikverhalten und Resonanzprobleme haben, die keine Phasenanzahl behebt. Das Trägheitsverhältnis unter 5:1 bringen, bevor man sich um die Phasenkonfiguration kümmert.
OEM-Auswahlmatrix
| Design-Anforderung | 2-Phasen | 3-Phasen | 5-Phasen |
|---|---|---|---|
| Niedrigste Systemkosten | ✓ Beste | Akzeptabel | Nicht empfohlen |
| Reduzierte Vibration / Lärm | Begrenzt | ✓ Gut | ✓ Beste |
| Hochgeschwindigkeitsstabilität | Moderat | ✓ Gut | Gut |
| Open-Loop-Genauigkeit unter 0,1° | Nicht zuverlässig | Grenzwertig | ✓ Ja |
| Thermische Dauerlaufbelastbarkeit | Moderat | ✓ Gut | ✓ Gut |
| Globale Teileverfügbarkeit | ✓ Hervorragend | Gut | Eingeschränkt |
| Halbleiter / Präzisionsanwendung | Nicht geeignet | Grenzwertig | ✓ Standardwahl |
Zukunftstrends bei Mehrphasen-Schrittmotoren
Die Grenze zwischen Schrittmotoren und Servomotoren verschwimmt weiter. Closed-Loop-Schrittmotorsysteme – 2-Phasen-Motoren mit Encoder-Rückführung und feldorientierter Regelung – liefern heute servoähnliche Leistung zu Schrittmotorpreisen. Das reduziert einen Teil der Motivation, für Präzisionsanwendungen auf 5-Phasen zu wechseln, da ein Closed-Loop-2-Phasen-System Drehmomentwelligkeit und Resonanz in Firmware kompensieren kann.
Trotzdem behalten 5-Phasen-Motoren einen inhärenten Vorteil in Anwendungen, wo die Encoder-Rückführschleife selbst Latenzprobleme verursacht oder das mechanische System zu schwach gedämpft ist, um die transienten Störungen zu tolerieren, die eine Closed-Loop-Korrektur erzeugt. In diesen Fällen ist das ruhigere Open-Loop-Verhalten eines 5-Phasen-Motors einem Closed-Loop-2-Phasen-System tatsächlich vorzuziehen.
Auf der Treiberseite schieben integrierte Motor-Treiber-Module die Phasenanzahl-Komplexität ins Motorgehӓuse. Einige Hersteller liefern 5-Phasen-Motoren mit integrierter Treiberelektronik, was den Systemintegrationsaufwand für OEM-Entwickler reduziert. Dieser Trend wird sich mit fortschreitender Leistungselektronik-Miniaturisierung wahrscheinlich beschleunigen.
Fazit
Die Phasenanzahl bei Schrittmotoren ist ein fundamentaler Konstruktionsparameter, kein Marketing-Unterscheidungsmerkmal. Zweiphasen-Motoren dominieren die Industrieautomation aus guten Gründen – Kosten, Verfügbarkeit und ausreichende Leistung für die meisten Aufgaben. Dreiphasen-Motoren besetzen eine nützliche Mitte für Anwendungen, bei denen Vibration und thermisches Verhalten zählen. Fünfphasen-Motoren sind das richtige Werkzeug für Präzisions- und Halbleiteranwendungen, wo ruhiger Lauf und niedrige Resonanz nicht verhandelbar sind.
Die Auswahllogik ist nicht kompliziert: Phasenkonfiguration an die tatsächlichen Leistungsanforderungen der Anwendung anpassen, die gesamten Systemkosten inklusive Treiber und Integration berücksichtigen und nicht über-spezifizieren. Ein gut eingesetztes 2-Phasen-System wird ein schlecht eingesetztes 5-Phasen-System jedes Mal übertreffen.
Häufig gestellte Fragen
Was ist der praktische Unterschied in der Laufruhe zwischen 2-Phasen- und 5-Phasen-Schrittmotor?
Im Vollschrittbetrieb erzeugt ein 5-Phasen-Motor etwa 4–8 % Drehmomentwelligkeit gegenüber 25–35 % bei einem 2-Phasen-Motor. Mit sinusförmigem Mikroschritt verringert sich der Abstand, bleibt aber signifikant – typischerweise 1–3 % gegenüber 5–15 %. Der Unterschied ist in Präzisionsanwendungen hör- und messbar und wirkt sich direkt auf die Oberflächengüte bei der Bearbeitung und die Positionsstabilität in optischen Systemen aus.
Macht Mikroschritt den 5-Phasen-Motor überflüssig?
Nicht vollständig. Mikroschritt reduziert Drehmomentwelligkeit und verbessert die Laufruhe, aber die Verbesserung wird durch Wicklungsinduktivität und EMK-Verzerrung bei Drehzahl begrenzt. Der strukturelle Vorteil des 5-Phasen-Motors – mehr Phasen, kleinere Flussübergänge – bleibt auch mit Mikroschritt bestehen. Für Anwendungen, die Genauigkeit unter 0,1° oder sehr niedrige Vibration erfordern, bleibt 5-Phasen unabhängig von der Mikroschritt-Auflösung die bessere Wahl.
Warum resonieren 2-Phasen-Schrittmotoren stärker als 5-Phasen-Motoren?
Das 2-Phasen-Erregungsmuster erzeugt größere, abrupte magnetische Flussübergänge pro Schritt. Jeder Übergang erteilt dem Rotor einen Impuls, der seine Eigenfrequenz anregt. Mit fünf Phasen sind die Flussübergänge kleiner und häufiger, was die Impulsenergie pro Schritt reduziert und die Resonanzfrequenz nach oben verschiebt, wo sie weniger wahrscheinlich mit Betriebsdrehzahlen zusammenfällt.
Kann ein 3-Phasen-Schrittmotor mit Standard-2-Phasen-Treibern betrieben werden?
Nein. Dreiphasen-Schrittmotoren benötigen einen 3-Phasen-Brückentreiber mit entsprechender Kommutierungslogik. Manche 3-Phasen-Schrittmotortreiber teilen die Hardware-Architektur mit BLDC-Treibern, aber die Firmware und die Stromreferenzerzeugung sind schrittmotorspezifisch. Ein 2-Phasen-Treiber an einem 3-Phasen-Motor führt zu falscher Kommutierung und wahrscheinlich zur Zerstörung des Motors.
Was ist der typische Schrittwinkel eines 3-Phasen-Schrittmotors?
Standardmäßige 3-Phasen-Hybrid-Schrittmotoren haben einen Vollschrittwinkel von 1,2°, was 300 Schritte pro Umdrehung ergibt. Das resultiert aus der Kombination der 3-Phasen-Statorkonfiguration mit einem 50-zähnigen Rotor – demselben Rotor, der in den meisten 2-Phasen-Hybrid-Schrittmotoren verwendet wird. Der feinere Schrittwinkel im Vergleich zu 2-Phasen (1,8°) trägt zum ruhigeren Bewegungsprofil bei.
Wann lohnt sich ein 5-Phasen-Schrittmotor nicht?
Wenn die Anwendung keine Open-Loop-Genauigkeit unter 0,1° erfordert, wenn die Vibrationspegel mit einem 2-Phasen- oder 3-Phasen-Motor akzeptabel sind oder wenn der Treiber-Kostenaufschlag die Stücklistenziele signifikant beeinträchtigt, ohne einen entsprechenden Leistungsvorteil zu bringen. Allgemeine CNC-Achsen, Verpackungsmaschinen und die meisten Förderanwendungen rechtfertigen 5-Phasen nicht. Die Kosten sind in Halbleiteranlagen, Präzisionsdosierung, optischer Ausrichtung und Medizinrobotik gerechtfertigt, wo die Leistungsanforderungen wirklich anspruchsvoll sind.
Wie beeinflusst die Phasenanzahl das thermische Verhalten von Schrittmotoren?
Mehr Phasen verteilen die Kupferverluste auf mehr Wicklungssätze und reduzieren so die Spitzentemperatur in jeder einzelnen Wicklung. Ein 5-Phasen-Motor, der mit demselben Effektivstrom wie ein 2-Phasen-Motor läuft, hat niedrigere Wicklungsspitzentemperaturen und eine gleichmäßigere Wärmeverteilung über den Stator. Das zählt bei Dauerlauf-Anwendungen, wo thermische Grenzen das verfügbare Drehmoment einschränken. Dreiphasen-Motoren bieten hier eine nennenswerte Verbesserung gegenüber 2-Phasen; 5-Phasen bringt weitere Verbesserung, aber mit abnehmenden Erträgen für die meisten industriellen Einschaltdauern.