
Die meisten Ingenieure wählen Schrittmotoren nach einer einzigen Zahl im Datenblatt aus: Haltemoment. Fett gedruckt, leicht vergleichbar zwischen Herstellern, und es vermittelt ein falsches Gefühl von Sicherheit. Die Realität ist: Das Haltemoment verrät fast nichts darüber, wie ein Motor sich verhält, wenn er tatsächlich dreht. Ich habe einen 3-N·m-Motor bei 400 U/min unter Last stehenbleiben sehen, während ein 2,5-N·m-Aggregat eines anderen Lieferanten bei 800 U/min problemlos lief. Gleicher Prüfaufbau, gleicher Treiber, gleiche Last. Der Unterschied lag ausschließlich in der Form ihrer Drehmomentkurven.
Dieser Artikel gehört zu einer technischen Reihe. Die zentrale Übersicht: Schrittmotor Grundlagen: Typen, Auswahl & OEM. Ergänzend: Wie funktioniert ein Schrittmotor?, das Schrittmotor Funktionsprinzip, der Schrittmotor Typen Vergleich, Hybrid vs Permanentmagnet Schrittmotor, Schrittwinkel: 1,8° vs 0,9° und Schrittmotor Phasen: 2-, 3-, 5-Phasen.
Diese Diskrepanz verursacht echte Probleme. Maschinen gehen an Kunden, dann bleiben Motoren mitten im Zyklus stehen. Konstrukteure überdimensionieren Motoren um 40 % und fügen unnötige Kosten und Rotorträgheit hinzu. Produktionslinien stehen still, während jemand herauszufinden versucht, warum Berechnungen, die auf dem Papier gut aussahen, in der Praxis versagt haben. In neun von zehn Fällen liegt die Ursache in einer Drehmomentkurve, die entweder niemand gelesen oder niemand verstanden hat.
Dieser Artikel geht durch, was Schrittmotor Drehmomentkurven tatsächlich für die Maschinenkonstruktion bedeuten. Wir behandeln die drei Drehmomentkennwerte, die zählen, warum Drehmoment bei Drehzahl einbricht, wie Resonanz einen Motor selbst innerhalb der Nenngrenzen außer Tritt bringen kann und warum die Treiberspannung der Hebel ist, den die meisten Ingenieure zu wenig nutzen. Das Ziel ist nicht Theorie. Es geht darum, dass Ihr nächster Entwurf auf Anhieb funktioniert.
Was eine Drehmomentkurve tatsächlich zeigt
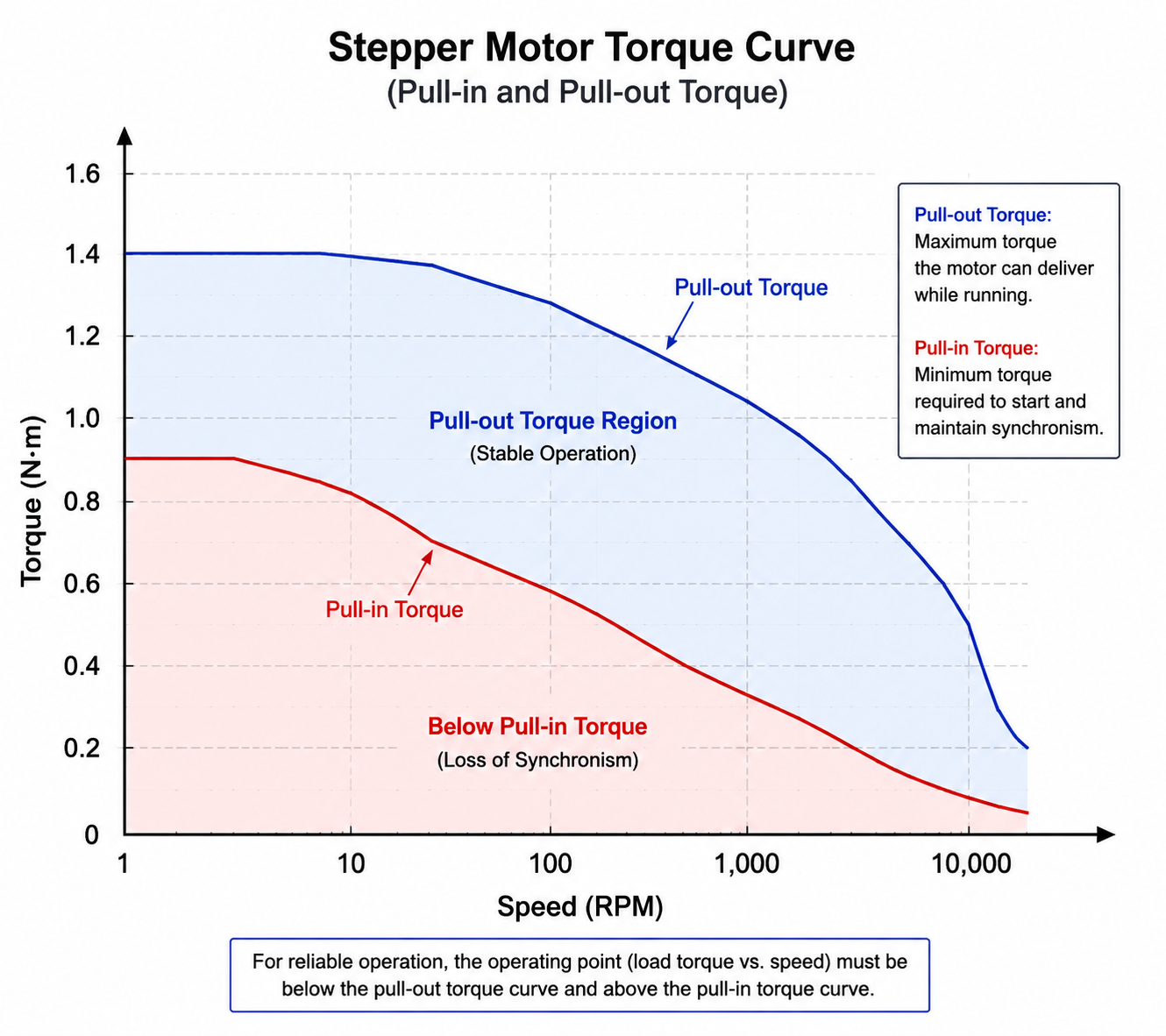
Eine Schrittmotor Drehmomentkurve – manchmal als Drehzahl-Drehmoment-Kurve oder Pull-Out-Kurve auf Datenblättern bezeichnet – zeigt, wie viel Last der Motor bei einer bestimmten Drehzahl bewältigen kann, bevor er die Synchronisation verliert. Die Drehzahl liegt auf der horizontalen Achse, meist in U/min oder Schritten pro Sekunde. Das Drehmoment liegt auf der vertikalen Achse, typischerweise in N·m oder oz-in. Man bekommt zwei unterschiedliche Kurven im selben Diagramm: eine für Pull-In-Bedingungen, eine für Pull-Out.
Diese Kurven sind keine theoretischen Vorhersagen. Sie werden gemessen, indem der Motor gegen eine Bremse oder einen Dynamometer bei verschiedenen Drehzahlen läuft und der Punkt aufgezeichnet wird, an dem er stehen bleibt. Prüfspannung, Treibertyp und Stromeinstellung beeinflussen alle das Ergebnis. Ändern Sie eine dieser Variablen und Sie bekommen eine andere Kurve. Wenn Sie Motoren anhand einer 24-V-Kurve bewerten, Ihre Anwendung aber mit 48 V läuft, unterschätzt das Datenblatt, was Sie tatsächlich bekommen. Drehen Sie die Situation um und Sie werden sich wundern, warum ein Motor, der „funktionieren sollte", ständig ausfällt.
Was die Drehmomentkurve liefert, ist eine Grenze. Bleiben Sie mit etwas Reserve darunter und der Motor folgt den befohlenen Schritten. Überschreiten Sie sie und der Rotor verliert die Synchronisation. Die Steuerung sendet weiter Impulse, aber die Welle ist nicht dort, wo die Steuerung sie vermutet. In Open-Loop-Systemen ist das ein stiller Ausfall. Kein Alarm, kein Fehlercode – nur ein Positionsfehler, der sich akkumuliert, bis jemand bemerkt, dass Ausschussteile vom Band kommen.
Haltemoment: Die Zahl, die jeder überschätzt
Haltemoment ist das statische Drehmoment, dem ein Motor widerstehen kann, wenn beide Phasen mit Nennstrom bestromt sind und der Rotor blockiert ist. Man kann es sich als das Drehmoment vorstellen, das nötig ist, um die Welle gewaltsam aus der Position zu drehen, während der Motor bestromt und stationär ist. Es wird bei Stillstand gemessen und es ist die größte Zahl auf dem Datenblatt, weil es am einfachsten zu messen und am vorteilhaftesten zu drucken ist.
Wo Haltemoment relevant ist: vertikale Achsen, die Position bei eingeschalteter Spannung halten müssen, Klemm-Anwendungen und Anwendungen, bei denen die Last über längere Zeit stillsteht. Es gibt auch einen groben Anhaltspunkt für die Steifigkeit bei niedrigen Drehzahlen. Wenn die Welle äußeren Kräften ohne große Auslenkung widerstehen soll, ist Haltemoment eine aussagekräftige Zahl.
Wo es versagt, ist überall dort, wo der Motor sich bewegen muss. Das Verhältnis zwischen Haltemoment und Drehmoment bei 500 U/min ist kein fester Faktor. Es hängt von Wicklungsinduktivität, Versorgungsspannung und Gegen-EMK ab. Zwei Motoren mit identischem Haltemoment können völlig unterschiedliches Drehmoment bei 300 U/min liefern. Ich habe Motoren mit 2,8 N·m Haltemoment ausgebaut, die bei 300 U/min nur 0,9 N·m lieferten, während ein anderer Motor mit 2,2 N·m Haltemoment bei gleicher Drehzahl 1,4 N·m brachte. Die niedrigere Wicklungsinduktivität des zweiten Motors ließ den Strom bei Drehzahl schneller aufbauen, obwohl die statische Nennleistung niedriger war. Hätten Sie nur die fett gedruckte Zahl auf Seite eins jedes Datenblatts verglichen, hätten Sie den falschen Motor gewählt.
Pull-In Drehmoment: Anlaufen ohne Anlaufhilfe
Das Pull-In Drehmoment beschreibt die maximale Last, die der Motor aus dem Stand überwinden und auf eine bestimmte Drehzahl beschleunigen kann – ohne jede Beschleunigungsrampe. Sie geben eine Schrittfrequenz vor und der Motor rastet entweder ein und folgt oder er tut es nicht. Die Pull-In-Kurve definiert diese Grenze.
Warum liegt sie niedriger als das Pull-Out Drehmoment? Weil der Rotor beim Start keinen Schwung hat. Er muss Haftreibung überwinden, Lastträgheit beschleunigen, alles auf einmal. Es gibt keine kinetische Energie, die in der rotierenden Masse gespeichert ist und das Magnetfeld unterstützt. Die Pull-In-Kurve fällt mit der Drehzahl ab, weil die verfügbare Zeit zur Bestromung jeder Wicklung mit steigender Schrittfrequenz schrumpft, sodass der Strom nie den vollen Wert vor der nächsten Kommutierung erreicht.
In der Praxis läuft kaum eine echte Industrieanwendung ohne irgendeine Form von Beschleunigungsrampe, sodass Ingenieure selten strikt innerhalb des Pull-In-Bereichs arbeiten. Aber die Pull-In-Kurve zählt trotzdem für Maschinen, die sehr kurze Bewegungen mit aggressiver Beschleunigung ausführen. Wenn Ihr Bewegungsprofil im Wesentlichen ein nahezu augenblicklicher Start ist, leben Sie im Pull-In-Bereich, ob Sie es geplant haben oder nicht.
Pull-Out Drehmoment: Die Kurve, die Ihre Maschine tatsächlich begrenzt
Das Pull-Out Drehmoment ist die maximale Last, die der Motor bei Drehzahl halten kann, wenn er bereits synchronisiert ist und läuft. Das ist die Kurve, auf die Sie die meiste Zeit schauen werden, denn sie repräsentiert das verfügbare Drehmoment während der Konstantgeschwindigkeits- und Verzögerungsphasen einer Bewegung – und dort verbringen die meisten Maschinen den Großteil ihrer Zykluszeit.
Die Pull-Out-Kurve liegt oberhalb der Pull-In-Kurve, weil ein drehender Rotor Schwung hat. Das Magnetfeld muss ihn nicht jedes Mal aus dem Stand losreißen. Der Rotor bewegt sich bereits, also muss das Feld hauptsächlich die Synchronisation halten, statt sie aus dem Nichts aufzubauen. Der Abstand zwischen Pull-In und Pull-Out verengt sich mit zunehmender Drehzahl und bei sehr hohen Schrittfrequenzen nähern sich beide Kurven an.
Überschreiten Sie die Pull-Out-Grenze und der Rotor verliert die Synchronisation. Das Drehmoment baut nicht sanft ab – es bricht ein. Der Motor bleibt stehen, und in einem Open-Loop-System gibt es keine Rückmeldung, die den Fehler meldet. Die Steuerung denkt, sie führt die Bewegungen korrekt aus. Die Maschine läuft weiter. Man merkt nur, dass etwas schiefgelaufen ist, wenn man die Teile misst. Bei Closed-Loop-Schrittmotorsystemen mit Encodern erkennt der Treiber den Fehler und kann Alarm schlagen oder eine Korrektur versuchen. Aber die Pull-Out-Grenze selbst verschiebt sich nicht; die Physik der magnetischen Synchronisation bei Drehzahl ist dieselbe, unabhängig davon, ob man sie überwacht oder nicht.
Die Physik hinter dem Drehmomentabfall bei Drehzahl
Jede Schrittmotorwicklung ist eine Induktivität, und Induktivitäten widersetzen sich Stromänderungen. Wenn der Treiber Spannung anlegt, steigt der Strom gemäß der L/R-Zeitkonstante der Wicklung, nicht augenblicklich. Bei niedrigen Schrittfrequenzen ist die Kommutierungsperiode lang genug, dass der Strom seinen Nennwert lange vor dem nächsten Phasenwechsel erreicht. Drehmoment ist proportional zum Strom, also bekommt man volles Drehmoment.
Mit steigender Drehzahl schrumpft die Zeit zwischen Kommutierungen. Irgendwann wird sie kürzer als die Zeit, die der Strom braucht, um den Sollwert zu erreichen. Die Wicklung erreicht nie den vollen Strom, der Fluss ist reduziert und das Drehmoment sinkt. Das ist eine elektrische Begrenzung, keine mechanische. Die Lager sind nicht das Problem. Die Rotorträgheit ist es (noch) nicht. Der Flaschenhals ist, wie schnell man Strom durch eine Induktivität treiben kann.
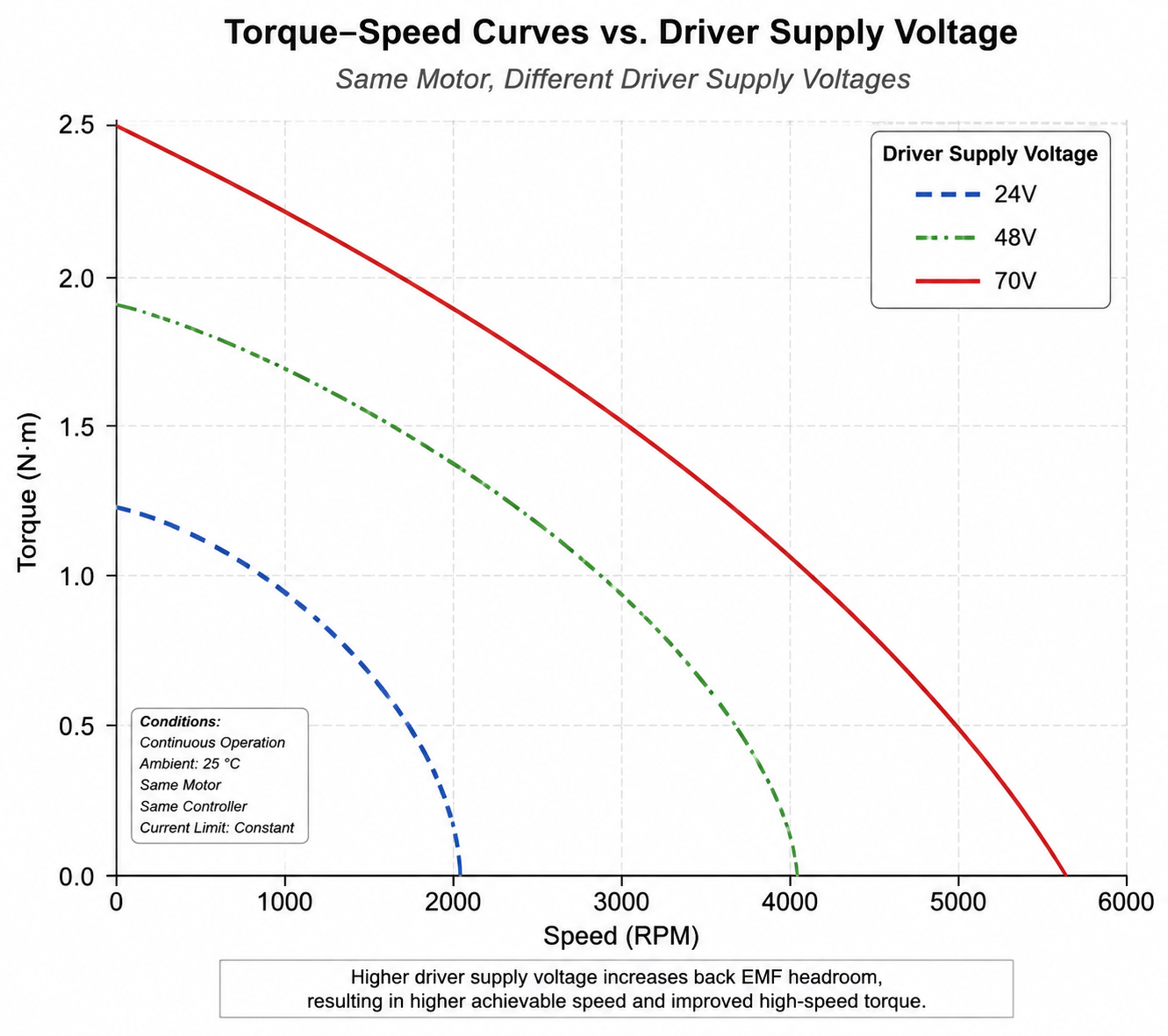
Die Gegen-EMK verschärft das Problem. Ein drehender Rotor erzeugt eine Spannung, die der Versorgung entgegenwirkt. Je schneller er dreht, desto höher die Gegen-EMK und desto weniger Nettospannung steht zur Verfügung, um Strom in die Wicklung zu treiben. Bei irgendeiner Drehzahl sind Gegen-EMK plus ohmscher Spannungsabfall gleich der Versorgungsspannung. Der Stromfluss hört ganz auf. Das Drehmoment erreicht null. Diese Drehzahl ist mit einer höheren Versorgungsspannung höher. Deshalb holt ein 24-V-Treiber vielleicht 400 U/min aus einem Motor, der an 48 V problemlos 900 U/min läuft. Der Motor hat sich nicht geändert. Die verfügbare Spannung schon.
Resonanz ist nicht nur Lärm
Schrittmotorresonanz ist kein kosmetisches Problem. Bei bestimmten Drehzahlen fällt die Schrittfrequenz mit der Eigenfrequenz des Systems aus Rotorträgheit und magnetischer Feder zusammen. Der Rotor schießt über, wird zurückgezogen, schießt wieder über. Statt sauber von Schritt zu Schritt zu gehen, schwingt die Welle. Das Drehmoment kann an diesem Betriebspunkt um die Hälfte oder mehr einbrechen und der Motor kann stehen bleiben, obwohl das Lastmoment deutlich innerhalb der veröffentlichten Pull-Out-Kurve liegt.
Das typische Resonanzband für NEMA-23- und NEMA-34-Motoren liegt irgendwo zwischen 100 und 300 U/min, wobei der genaue Bereich von Rotorträgheit, Lastträgheit und der elektromagnetischen Auslegung des Motors abhängt. Manche Datenblätter glätten diesen Bereich. Trauen Sie keiner Kurve, die zwischen 2 und 5 Umdrehungen pro Sekunde zu sauber aussieht. Echte Motoren haben dort einen Einbruch, und wenn Ihre Anwendung im stationären Betrieb in diesem Bereich arbeitet, müssen Sie das angehen.
Mikroschritt reduziert die Anregung. Indem jeder Vollschritt in kleinere Inkremente unterteilt wird, sind die Stromübergänge zwischen den Phasen weicher und die Drehmomentschwankung von Schritt zu Schritt sinkt. Der Nachteil: Das Drehmoment pro Mikroschritt nimmt mit höherer Mikroschritt-Auflösung ab. Bei 16-fach-Mikroschritt beträgt das inkrementelle Drehmoment pro Mikroschritt etwa 10 % des Vollschritt-Drehmoments. Für die meisten Positionieranwendungen spielt das keine Rolle, weil das kumulative Haltemoment über mehrere Mikroschritte die nötige Steifigkeit liefert. Aber man sollte es wissen, wenn man auf Drehmoment bei einem ganz bestimmten Wellenwinkel angewiesen ist.
Spannung: Der Hebel, den die meisten Ingenieure liegen lassen
Wenn Sie sich eine Sache aus all dem hier merken, dann diese: Die Versorgungsspannung, die Ihren Treiber speist, hat mehr Einfluss auf das nutzbare Drehmoment bei Drehzahl als jede andere einzelne Variable, die Sie steuern können. Mehr als die Motorbaugröße. Mehr als der Nennstrom. Mehr als die Mikroschritt-Einstellungen.
Der Grund: Die Stromanstiegszeit in einer Schrittmotorwicklung ist direkt proportional zur angelegten Spannung. Verdoppeln Sie die Spannung und Sie halbieren etwa die Zeit, um den Nennstrom zu erreichen. Das bedeutet, der Motor kann mit höherer Drehzahl laufen, bevor die Stromverhungerung einsetzt. Derselbe NEMA-23-Motor, der an 24 V bei 600 U/min 0,8 N·m liefert, kann an 48 V bei gleicher Drehzahl 1,7 N·m bringen. Das ist keine marginale Verbesserung. Das ist der Unterschied zwischen einer Maschine, die funktioniert, und einer, die zurückgeschickt wird.
Ich habe irgendwann drei Spannungen am selben Motor und derselben Last getestet. Die Ergebnisse waren nicht subtil, also habe ich sie aufgeschrieben. Die Zahlen unten stammen von einem echten Prüfstand, nicht aus einer Simulation.
| Drehzahl (U/min) | Drehmoment bei 24 V (N·m) | Drehmoment bei 48 V (N·m) | Drehmoment bei 70 V (N·m) |
|---|---|---|---|
| 100 | 2,1 | 2,1 | 2,1 |
| 300 | 1,6 | 1,9 | 2,0 |
| 600 | 0,8 | 1,7 | 1,9 |
| 900 | 0,3 | 1,1 | 1,5 |
Bei niedriger Drehzahl spielt Spannung kaum eine Rolle. Die Wicklung hat genug Zeit, um so oder so den Nennstrom zu erreichen. Aber bei 600 U/min hatte der 24-V-Aufbau über 60 % seines Langsam-Drehmoments verloren, während die 48-V- und 70-V-Aufbauten stabil blieben. Deshalb funktioniert der Vergleich von Drehmomentkurven zwischen Herstellern nur, wenn man die Prüfspannung kennt. Ein Motor, der mit 70 V getestet wurde, sieht bei Drehzahl dramatisch besser aus als derselbe Motor, getestet mit 24 V. Manche Lieferanten veröffentlichen Kurven bei Spannungen, die weit über dem liegen, was die meisten OEMs tatsächlich einsetzen. Lesen Sie das Kleingedruckte.
Höhere Spannung erhöht die Motorerwärmung und die Treiberschaltverluste, also gibt es eine thermische Grenze. Aber in der Industrieautomation wird die praktische Spannungsobergrenze meist durch die maximale Eingangsnennspannung des Treibers und Sicherheitsvorschriften gesetzt, nicht durch thermische Grenzen des Motors – vorausgesetzt, der mittlere Strom bleibt innerhalb der Spezifikation.
Drehmomentkurven in der realen Maschinenkonstruktion anwenden
Die Drehmomentkurve ist nichts, worauf man einen Blick wirft, nachdem man einen Motor ausgesucht hat. Sie ist das Werkzeug, mit dem man den Motor überhaupt erst auswählt. Der Prozess sollte mit den Anwendungsanforderungen beginnen: auf die Motorwelle reflektierte Lastträgheit, geforderte Beschleunigungsrate, maximale Drehzahl, verfügbare Versorgungsspannung und Einschaltdauer. Daraus berechnet man das Drehmoment, das der Motor während Beschleunigung, konstanter Drehzahl und Verzögerung aufbringen muss.
Das Beschleunigungsmoment dominiert fast immer. Ein Bewegungsprofil, das 0,6 N·m zur Überwindung der Reibung bei konstanter Drehzahl benötigt, kann 2,1 N·m brauchen, um das Beschleunigungsziel zu erreichen. Diese 2,1 N·m müssen unterhalb der Pull-Out-Kurve bei der Drehzahl liegen, bei der die Beschleunigung in die konstante Geschwindigkeit übergeht. Wenn nicht, bleibt der Motor an diesem Übergangspunkt jedes Mal stehen.
Reserve zählt bei Schrittmotoren mehr als bei Servos. Ein Open-Loop-Schrittmotor sollte mindestens 30 % Reserve unter der Pull-Out-Kurve haben, und 50 % sind nicht konservativ, wenn die Last schwankt, die Maschine vibriert oder Ausfallzeiten teuer sind. Closed-Loop-Schrittmotorsysteme können mit knapperen Reserven arbeiten, weil der Treiber Schrittverluste erkennt. Aber die Pull-Out-Kurve bleibt eine harte Grenze. Ein Encoder meldet, dass der Motor stehen geblieben ist; er verhindert den Stillstand nicht.
Fehler, die im Feld immer wieder auftauchen
Nach genug Zeit in der Maschinenfehlersuche werden bestimmte Muster offensichtlich. Das sind keine Exoten. Es sind Fehler, die quer durch Firmen, Branchen und Erfahrungsstufen auftreten.
| Was schiefläuft | Warum es passiert | So vermeidet man es |
|---|---|---|
| Motor bleibt bei Drehzahl stehen, obwohl „richtig dimensioniert" | Motor wurde nur nach Haltemoment dimensioniert; Drehmoment bei Betriebsdrehzahl viel niedriger | Dimensionierung anhand Pull-Out-Kurve bei der geforderten Betriebsdrehzahl, nicht nach statischer Nennleistung |
| Leistung schlechter als Datenblatt-Kurve suggeriert | Treiber-Versorgungsspannung niedriger als die für die veröffentlichte Kurve verwendete Spannung | Versorgungsspannung an Datenblattbedingungen anpassen oder entsprechend abwerten |
| Motor verliert Schritte während Beschleunigung | Lastträgheit zu hoch relativ zur Rotorträgheit; Beschleunigungsmoment überschreitet Pull-Out | Last-Rotor-Trägheitsverhältnis unter 10:1 halten; Beschleunigungsmoment gegen Kurve prüfen |
| Motor vibriert stark bei einer bestimmten Drehzahl | Dauerbetrieb im Resonanzband | Mikroschritt nutzen, Dämpfung hinzufügen oder Betriebsdrehzahl aus dem Resonanzbereich verschieben |
| Intermittierendes Stehenbleiben ohne erkennbare Ursache | Drehmomentreserve zu knapp; Netzspannungsschwankung oder Temperaturdrift schiebt über Grenze | 30–50 % Reserve unter Pull-Out-Kurve für Open-Loop-Systeme einplanen |
Fazit
Schrittmotor Drehmomentkurven enthalten die Information, die tatsächlich vorhersagt, ob ein Motor in Ihrer Anwendung funktioniert. Das Haltemoment ist der Ausgangspunkt, nicht die Antwort. Das Pull-In Drehmoment sagt Ihnen, was ohne Rampe möglich ist. Das Pull-Out Drehmoment definiert Ihre kontinuierliche Betriebshüllkurve. Beide fallen mit der Drehzahl ab, und die Abfallrate hängt mehr von Ihrer Treiberspannung ab als von der Typenschild-Nennleistung des Motors.
Die meisten Feldausfälle, mit denen ich zu tun hatte, lassen sich auf drei Ursachen reduzieren: Spannung zu niedrig, Lastträgheit zu hoch oder Betrieb in einem Resonanzbereich ohne Gegenmaßnahmen. Die Drehmomentkurve gibt Ihnen die Daten, um alle drei zu vermeiden – aber nur, wenn Sie sie mit dem richtigen Kontext lesen und eine zu Ihrer Systemarchitektur passende Reserve anwenden.
Wenn Sie Motoren für eine neue Konstruktion spezifizieren: Besorgen Sie sich die Drehmomentkurven bei Ihrer tatsächlichen Betriebsspannung. Rechnen Sie die Beschleunigungsmomente. Wenden Sie realistische Reserven an. Testen Sie an den Extremen Ihres Arbeitszyklus, nicht nur im Nennpunkt. Die Stunden, die Sie dafür vorab aufwenden, sind nichts im Vergleich zu den Kosten und Terminauswirkungen einer Maschinenumkonstruktion, die beim Kunden nicht zuverlässig läuft.
Häufig gestellte Fragen
Was ist der Unterschied zwischen Pull-In und Pull-Out Drehmoment?
Das Pull-In Drehmoment ist die maximale Last, gegen die ein Motor aus dem Stand anlaufen und auf eine bestimmte Drehzahl beschleunigen kann – ohne Beschleunigungsrampe. Das Pull-Out Drehmoment ist die maximale Last, die er halten kann, wenn er bereits synchronisiert ist und läuft. Weil ein drehender Rotor Schwung hat, der das Magnetfeld unterstützt, ist das Pull-Out Drehmoment bei gleicher Drehzahl immer höher als das Pull-In Drehmoment.
Warum sinkt das Schrittmotor-Drehmoment mit steigender Drehzahl?
Zwei Hauptgründe. Erstens begrenzt die Wicklungsinduktivität, wie schnell der Strom in jeder Phase ansteigen kann. Bei hohen Schrittfrequenzen ist die Kommutierungsperiode kürzer als die elektrische Zeitkonstante der Wicklung, sodass der Strom nie seinen Nennwert erreicht und das Drehmoment sinkt. Zweitens wirkt die Gegen-EMK des drehenden Rotors der angelegten Spannung entgegen und reduziert die Nettospannung, die zum Treiben des Stroms zur Verfügung steht. Höhere Versorgungsspannung bekämpft beide Effekte.
Wie bekomme ich mehr Drehmoment bei höheren Drehzahlen?
Erhöhen Sie die Treiber-Versorgungsspannung. Das ist die effektivste Einzelmaßnahme, die Sie treffen können. Höhere Spannung treibt den Strom schneller in die Wicklungsinduktivität und erweitert den nutzbaren Drehzahlbereich. Weitere Optionen: einen Motor mit niedrigerer Wicklungsinduktivität wählen oder auf ein Closed-Loop-Schrittmotorsystem wechseln, das sicher näher an der Pull-Out-Grenze arbeiten kann.
Was verursacht Schrittmotorresonanz?
Resonanz tritt auf, wenn die Schrittfrequenz mit der Eigenfrequenz des Systems aus Rotorträgheit und magnetischer Feder zusammenfällt. Der Rotor schwingt, statt sich in jeden Schritt zu setzen. Das typische Resonanzband für NEMA-23- und -34-Motoren liegt bei 100–300 U/min. Mikroschritt, Antiresonanz-Treiberalgorithmen, mechanische Dämpfung und das Programmieren der Beschleunigung so, dass die Resonanzzone schnell durchfahren wird, sind alles praktikable Gegenmaßnahmen.
Wie viel Drehmomentreserve ist genug für ein Open-Loop-System?
Mindestens 30 % unter der Pull-Out-Kurve für Anwendungen mit gleichmäßigen Lasten und sauberem mechanischen Aufbau. Bei variablen Lasten, stark vibrierenden Umgebungen oder Anwendungen, bei denen ein Stillstand Ausschuss oder Maschinenschäden bedeutet, sind 50 % angemessener. Die Reserve deckt Drehmomentwelligkeit, Versorgungsspannungsschwankungen, Temperatureffekte und die Tatsache ab, dass Datenblattkurven unter idealen Laborbedingungen gemessen werden.
Kostet Mikroschritt mich Drehmoment?
Es reduziert das an einer einzelnen Mikroschrittposition verfügbare Drehmoment, weil die Phasenströme aufgeteilt sind. Bei 16-fach-Mikroschritt beträgt das inkrementelle Drehmoment pro Mikroschritt etwa 10 % des Vollschritt-Drehmoments. Aber die gesamte kontinuierliche Drehmomentfähigkeit des Motors wird nicht signifikant reduziert. Der größere Zielkonflikt ist ruhigerer Lauf und niedrigere Resonanz gegen etwas geringere statische Steifigkeit in Zwischenpositionen.
Meine Drehmomentberechnungen sagen, der Motor sollte funktionieren, aber er bleibt trotzdem stehen. Warum?
Prüfen Sie die tatsächliche Zwischenkreisspannung am Treiber während des Betriebs, nicht die Nennspannung des Netzteils. Spannungseinbruch unter Last ist üblich. Prüfen Sie außerdem, ob die Treiber-Stromeinstellung dem Motornennstrom entspricht, ob die Lastträgheit nicht unterschätzt wurde und ob Sie nicht unwissentlich im Resonanzband des Motors arbeiten. Mechanische Probleme wie Klemmen oder Fluchtungsfehler können das Lastmoment ebenfalls über die berechneten Werte hinaus erhöhen.