
Kommunikationsfehler beim Schrittmotor-Treiber sind in der industriellen Automatisierung besonders frustrierend. Von CNC-Maschinen und Verpackungsanlagen bis zu Robotik und Inspektionssystemen – unzuverlässige Treiber-Kommunikation stoppt stabile Bewegungsanlagen abrupt.
Basierend auf Praxiserfahrungen bei Inbetriebnahmen und Feldtests zerlegt dieser Leitfaden die häufigsten Ursachen von Kommunikationsausfällen und erklärt, wie Ingenieure diese Schrittmotor-Treiber Kommunikationsfehler vor Ort diagnostizieren und beheben.
1. Hardware-Verbindungsprobleme
Lockere oder beschädigte Signalkabel
In der Praxis entstehen über 50 % der Kommunikationsfehler durch einfache Steckerprobleme. RS-485-, CAN- oder EtherCAT-Kabel wirken äußerlich intakt, haben aber oxidierte Pins, lockere Crimpverbindungen oder innere Leiterermüdung – besonders in beweglichen Kabelketten.
Alle Stecker neu einstecken und Pins auf Oxidation prüfen
Während der Bewegung Kontinuität mit Multimeter messen
Verdächtige Kabel austauschen statt wiederverwenden
Falscher Kabelltyp oder zu große Länge
Ungeschirmte Kabel oder Überschreitung der Protokollgrenzen führen zu Signalaussetzern. RS-485-Netze über ~1200 m ohne Repeater zeigen oft intermittierende Aussetzer.
Verwenden Sie geschirmte Twisted-Pair-Kabel und trennen Sie Kommunikationsleitungen physisch von Motorstromkabeln.
2. Elektromagnetische Störungen (EMI)
Leistungsstarke Motoren, Frequenzumrichter und Schaltnetzteile injizieren Rauschen direkt in Kommunikationsleitungen. EMI-bedingte Schrittmotor-Treiber Kommunikationsfehler treten oft zufällig und temperaturabhängig auf.
Signalkabel und Stromkabel nicht parallel verlegen
Ferritkerne an beiden Enden der Kommunikationskabel anbringen
Einpunkt-Erdung einrichten, um Erdschleifen zu vermeiden
3. Parameter-Mismatch bei Kommunikation
Baudrate und Frame-Format
Ein einziger fehlender Parameter – Baudrate, Parität, Stoppbit – blockiert die gesamte Kommunikation. Häufig bei Modbus-RTU-Netzen mit mehreren Geräten.
8-N-1 oder gefordertes Format bei Controller und Treiber prüfen
Einzigartigkeit der Slave-Adressen bestätigen
CRC-Fehler mit Protokoll-Diagnosetools analysieren
Falsche Protokollwahl
Stellen Sie sicher, dass beide Geräte dasselbe Protokoll nutzen (Modbus RTU, CANopen, EtherCAT). Korrekte Kabel mit falschem Protokoll scheitern stumm.
4. Stromversorgung und Erdung
Instabile oder unterdimensionierte Stromversorgungen lassen Kommunikations-ICs zurücksetzen. In 24V-Systemen ist Spannungsabfall unter ~20V bei Lastwechseln eine häufige Ursache.
Versorgungsspannung unter dynamischer Last messen
Ausreichenden Leistungsspielraum sicherstellen
Richtige Erdung prüfen (<4Ω)
5. Firmware- und Software-Faktoren
Veraltete Treiber-Firmware oder schlecht strukturierter Controller-Code lösen Timeouts aus.
Treiber-Firmware bei Verfügbarkeit aktualisieren
Befehls-Timing und Response-Handling validieren
Modbus Poll oder CAN-Analyzer für Frame-Inspektion nutzen
6. Hardware-Defekte
Bei allen anderen Checks: ESD, Verdrahtungsfehler oder Überspannung haben Ports dauerhaft beschädigt.
Sichtbare Portschäden inspizieren
Signalimpedanz zur Erde messen
Mit bekannt gutem Treiber kreuztesten
7. Schritt-für-Schritt-Diagnose-Workflow
System neustarten und Wiederholbarkeit beobachten
Auf minimale Netzkonfiguration reduzieren
Kabel, dann Treiber, dann Controller austauschen
Bei Bedarf Oszilloskop für Signalqualität
Treiber-Auswahl ist entscheidend
Viele anhaltende Schrittmotor-Treiber Kommunikationsfehler verschwinden nach Wechsel zu robusten Modellen mit Filterung und flexibler Konfiguration.
In Automatisierungssystemen bevorzugen Ingenieure Bus- und intelligente Schrittmotor-Treiber mit:
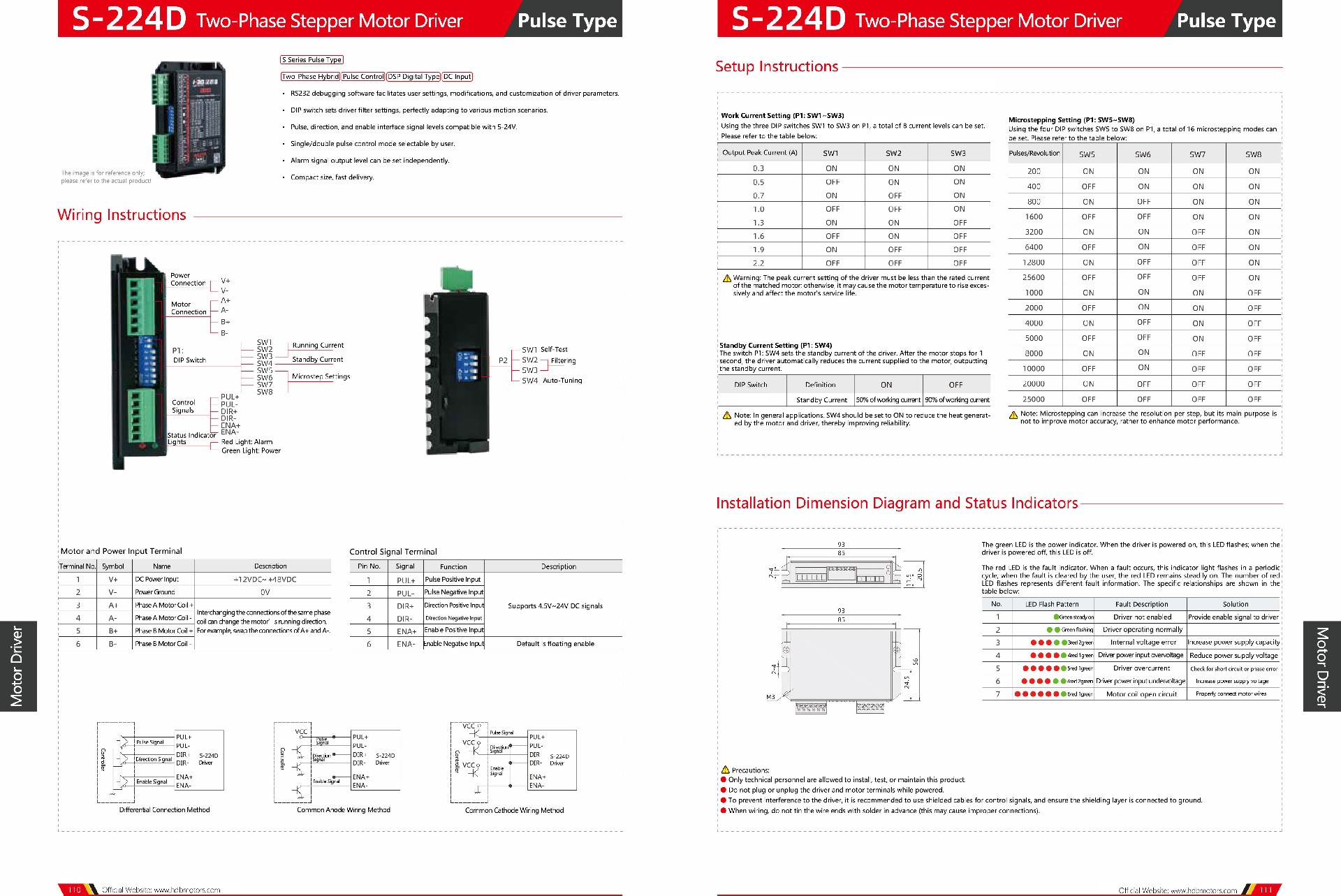
DIP-Schalter für Filterung verschiedener Bewegungsprofile
5–24V-kompatible Pulse/Direction/Enable-Signale
Auswählbare Einzel-/Doppelpuls-Modi
Benutzerdefinierte Alarm-Ausgangsstufen
Kompakte Bauform und schneller Versand reduzieren Umplanungszeiten.
Verfügbare Treiber-Serien für Ihre Anwendung
Häufig eingesetzte industrielle Modelle:
Bus-Typ / S-245D / Intelligent / S-224D / CSH-2285R / SSA-Serie / S-2822H / SSD-Serie / S-266D / DBL-4850H
Diese Plattformen passen sich via Hardware-Konfiguration an Szenarien an – ohne fragile Software-Lösungen.
Hilfe bei Auswahl oder Fehlerbehebung?
Bei anhaltenden Fehlern passen HDBMotor-Ingenieure Treiber exakt an Ihre Steuerungsarchitektur an.
Website-Produktlisten zeigen nicht alle Varianten. Nachricht hinterlassen mit Ihrer Anwendung für Spezifikationen, Verdrahtungstipps oder Muster.
Verwandte Themen:
Häufige Fragen zu Schrittmotor-Treiber Kommunikationsfehlern (FAQ)
Warum tritt ein RS485-Kommunikationsfehler beim Schrittmotor-Treiber auf?
Häufige Ursachen: Lockere Kabel, falsche Baudrate (z. B. nicht 9600 bps), EMI von Motorstrom oder Paritätsfehler. Prüfen Sie zuerst Kabel und Parameter.
Wie behebt man Modbus RTU Timeouts bei HDBMotor Treibern?
Slave-Adresse eindeutig setzen, CRC prüfen und Ferritkerne verwenden. HDBMotor S-245D unterstützt robuste Modbus-Filterung per DIP-Schalter.
Welche Kabel sind für EtherCAT Schrittmotor-Treiber geeignet?
Geschirmtes STP-Kabel (Cat5e/6), max. 100 m pro Segment. Trennen Sie von 48V-Stromkabeln, um EMI zu vermeiden.
Kann EMI den Schrittmotor-Treiber blockieren?
Ja, Parallelverlegung zu VFDs verursacht Rauschen. Lösung: Ferritkerne, Einpunkt-Erdung und getrennte Kanäle.
Welcher HDBMotor Treiber ist EMI-resistent?
S-245D Bus-Typ und SSD-Serie mit integrierter Filterung. Kompatibel mit 5-24V Signalen für CNC/Robotik.