
Einleitung: Warum Schrittmotoren in der Automatisierung weiterhin wichtig sind
Wenn Sie mit CNC-Maschinen, 3D-Druckern, medizinischen Geräten oder industriellen Automatisierungssystemen arbeiten, haben Sie mit hoher Wahrscheinlichkeit bereits einen Schrittmotor eingesetzt. Schrittmotoren sind bis heute sehr relevant, weil sie vorhersehbare Bewegungen, eine einfache Ansteuerung und ein gutes Drehmoment bei niedrigen Drehzahlen bieten.[web:56][web:50]
Doch was ist ein Schrittmotor genau, und wie funktioniert ein Schrittmotor in realen Anwendungen? Über die reine Lehrbuchdefinition hinaus werden Schrittmotoren vor allem dort geschätzt, wo Wiederholgenauigkeit, Zuverlässigkeit und Kostenkontrolle wichtiger sind als extreme Hochgeschwindigkeit.
Bei HDBMOTOR zählen Schrittmotoren weiterhin zu den am häufigsten nachgefragten Antriebskomponenten von OEM-Kunden, insbesondere in Anwendungen, in denen reproduzierbare Bewegungen und wirtschaftliche Systemlösungen im Vordergrund stehen.
Was ist ein Schrittmotor?
Ein Schrittmotor ist ein Elektromotor, der sich nicht kontinuierlich, sondern in diskreten Winkelschritten dreht. Jeder elektrische Impuls entspricht einer genau definierten mechanischen Bewegung. Dadurch eignet sich der Motor besonders für präzise Positionieraufgaben.[web:56][web:50][web:180]
Positionsregelung in vielen Anwendungen ohne Encoder möglich
Die Drehzahl wird über die Pulsfrequenz bestimmt
Die Drehrichtung wird digital gesteuert
Haltemoment steht auch im Stillstand zur Verfügung
Wie funktioniert ein Schrittmotor?
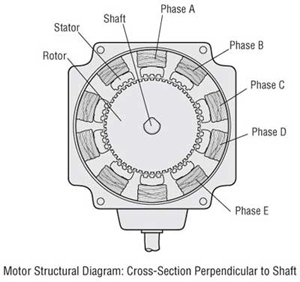
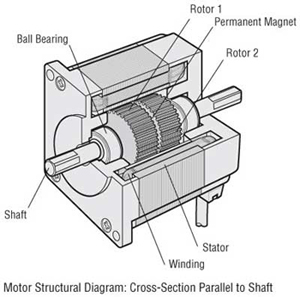
Um die Funktionsweise zu verstehen, ist es hilfreich, sich auf die magnetische Ausrichtung statt auf eine kontinuierliche Drehung zu konzentrieren. Der Stator enthält mehrere elektromagnetische Wicklungen, während der Rotor entweder als Permanentmagnet oder als gezahnte Eisenstruktur ausgeführt ist. Wird eine Statorphase bestromt, entsteht ein Magnetfeld, an dem sich der Rotor ausrichtet. Durch das sequentielle Umschalten der Phasen entsteht eine kontrollierte Drehbewegung in einzelnen Schritten.[web:56][web:180][web:189]
Der Stator enthält mehrere elektromagnetische Wicklungen
Der Rotor ist ein Permanentmagnet oder eine gezahnte Eisenstruktur
Wird eine Phase bestromt, entsteht ein Magnetfeld
Der Rotor richtet sich an diesem Feld aus
Durch die definierte Schaltfolge entsteht eine kontrollierte Rotation
Viele industrielle Schrittmotoren arbeiten mit einem Schrittwinkel von 1,8°, was 200 Schritten pro Umdrehung entspricht. Hochauflösende Varianten nutzen häufig 0,9° und erreichen 400 Schritte pro Umdrehung.[web:56][web:192]
Typen von Schrittmotoren
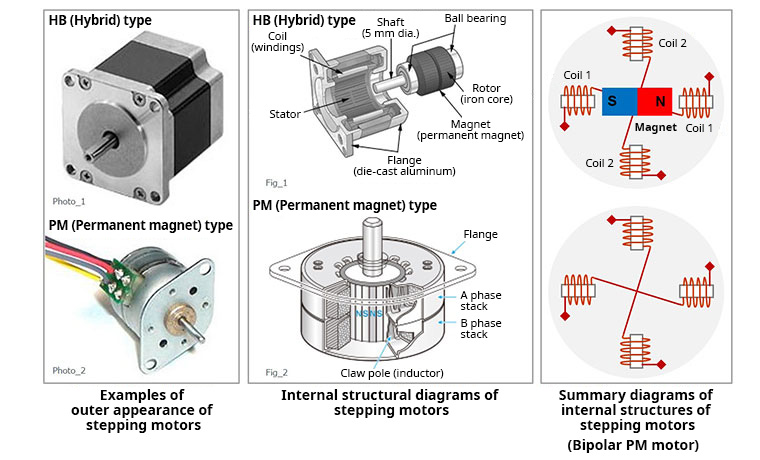
Permanentmagnet-Schrittmotoren (PM)
PM-Schrittmotoren verwenden Permanentmagnete im Rotor. Sie sind konstruktiv relativ einfach und kostengünstig, bieten aber im Vergleich zu Hybrid-Schrittmotoren meist eine geringere Auflösung und niedrigere Positioniergenauigkeit.[web:195][web:197]
Reluktanz-Schrittmotoren (VR)
VR-Schrittmotoren kommen ohne Permanentmagnete aus. Der Rotor richtet sich nach dem geringsten magnetischen Widerstand aus. Diese Bauart bietet oft eine schnelle Reaktion, verfügt aber typischerweise über geringeres Haltemoment.[web:193][web:198]
Hybrid-Schrittmotoren
Hybrid-Schrittmotoren kombinieren Eigenschaften von PM- und VR-Motoren. Sie verbinden hohe Präzision mit hohem Drehmoment und sind deshalb in industriellen Anwendungen besonders verbreitet. Ihr Rotor kombiniert Permanentmagnetismus mit einer gezahnten Struktur, wodurch kleine Schrittwinkel und gute Dynamik möglich werden.[web:192][web:196][web:198]
| Parameter | Hybrid-Schrittmotor | Reluktanz-Schrittmotor (VR) | Permanentmagnet-Schrittmotor (PM) |
|---|---|---|---|
| Rotorstruktur | Gezahnter Rotor mit Permanentmagnet | Gezahnter Weicheisenrotor | Permanentmagnet-Rotor |
| Permanentmagnet vorhanden | Ja | Nein | Ja |
| Funktionsprinzip | Magnetische Anziehung und Reluktanzmoment | Minimierung des magnetischen Widerstands | Magnetische Anziehung des Permanentmagneten |
| Typischer Schrittwinkel | 1,8° / 0,9° | 1,2° / 1,5° | 7,5° / 15° |
| Positioniergenauigkeit | Hoch | Mittel | Niedrig |
| Ausgangsdrehmoment | Hoch | Niedrig | Mittel |
| Haltemoment bei stromlos | Stark | Nahezu nicht vorhanden | Vorhanden |
| Dynamische Leistung | Sehr gut | Gut | Mittel |
| Drehzahlfähigkeit | Mittel bis hoch | Hoch | Niedrig bis mittel |
| Mechanische Komplexität | Hoch | Niedrig | Niedrig |
| Kostenklasse | Mittel bis hoch | Niedrig | Niedrig bis mittel |
| Regelungsaufwand | Mittel | Mittel | Niedrig |
| Typische Baugrößen | NEMA 8 / 11 / 17 / 23 / 34 | Oft nicht standardisiert | 20 mm / 25 mm / 28 mm |
| Typische Anwendungen | CNC, 3D-Druck, Robotik, Industrieautomation | Laborsysteme, Ausbildungsgeräte | Haushaltsgeräte, Ventile, Messinstrumente |
| Marktbedeutung | ★★★★★ (Mainstream) | ★ | ★★ |
Warum Schrittmotoren in der Automatisierung eingesetzt werden
Keine zusätzliche Rückführverdrahtung im Open-Loop-Betrieb erforderlich
Sehr gutes Drehmoment bei niedriger Drehzahl
Hohe Wiederholgenauigkeit
Niedrigere Systemkosten in vielen Anwendungen
Einfache Integration in PLCs und Motion-Controller
Gerade bei Anwendungen mit Resonanzen oder akustischen Problemen ist die richtige Auslegung entscheidend. Dazu passt auch unser Beitrag über die Reduzierung von Schrittmotor-Geräuschen.
Open-Loop- und Closed-Loop-Schrittmotorsysteme
Ein häufiger Irrtum ist, dass Schrittmotoren ohne Feedback grundsätzlich ungenau seien. Tatsächlich arbeiten korrekt ausgelegte Open-Loop-Systeme in vielen Anwendungen sehr zuverlässig. Closed-Loop-Schrittmotoren mit Encoder bieten dagegen Vorteile bei wechselnden Lasten, höheren Drehzahlen und größeren Anforderungen an Stabilität und Fehlersicherheit.[web:182][web:186][web:200]
Im Open-Loop-Betrieb wird davon ausgegangen, dass jeder Steuerimpuls exakt in Bewegung umgesetzt wird. Im Closed-Loop-Betrieb wird die tatsächlich erreichte Position überwacht und mit der Sollposition verglichen. Dadurch lassen sich Schrittverluste reduzieren oder vermeiden.[web:182][web:200]
Drehmoment-, Drehzahl- und Halteverhalten
Das Drehmoment sinkt mit steigender Drehzahl
Haltemoment steht bei Stillstand zur Verfügung
Im mittleren Drehzahlbereich können Resonanzen auftreten
Mikroschrittbetrieb verbessert die Laufruhe, aber nicht automatisch das verfügbare Drehmoment
Für eine stabile Ansteuerung ist auch der passende Treiber entscheidend. Weitere Informationen dazu finden Sie in unserem Fachbeitrag über die Funktionsweise von Schrittmotor-Treibern.
Typische Anwendungen von Schrittmotoren
CNC-Maschinen
3D-Drucker
Verpackungsanlagen
Medizinische Pumpen und Analysegeräte
Textil- und Etikettiermaschinen
Industrielle Linearantriebe
| Anwendung | Wichtige Anforderungen | Warum Schrittmotor? | Typische Einsatzfälle |
|---|---|---|---|
| CNC-Maschinen | Hohe Präzision, Wiederholgenauigkeit | Exakte Positionierung ohne komplexe Rückführung | X-/Y-/Z-Achsen, Werkzeugwechsler |
| Medizingeräte | Ruhiger Lauf, geringe Vibration, hohe Zuverlässigkeit | Vorhersehbare Bewegung, gute Mikroschrittsteuerung | Pumpen, Diagnosegeräte, Laborautomation |
| Automatisierungsanlagen | Wiederholte Positionierung, wirtschaftlicher Betrieb | Einfache Integration, zuverlässige Leistung | Fördersysteme, Etikettierung, Montageroboter |
Den richtigen Schrittmotor auswählen
Benötigtes Drehmoment mit Sicherheitsreserve
Erforderlicher Drehzahlbereich
Einschaltdauer und thermische Grenzen
Lastträgheit und mechanische Übertragung
Kompatibilität mit dem Treiber
Gerade bei 3D-Druck-Systemen ist die Auswahl des passenden Motors besonders wichtig. Dazu finden Sie ergänzend unseren Beitrag zur Auswahl eines besseren Extruder-Schrittmotors.
HDBMOTOR Schrittmotor-Lösungen
Schrittmotoren von NEMA 8 bis NEMA 34
Ausführungen mit hohem Drehmoment und niedriger Rotorträgheit
Integrierte Motor- und Treiberlösungen
Kundenspezifische Optionen für Welle, Wicklung und Flansch
Wenn Sie sich für alternative mehrphasige Konzepte interessieren, lohnt sich auch ein Blick auf unseren Artikel zum Dreiphasen-Schrittmotor und seinen Vorteilen.
Fazit
Wer versteht, was ein Schrittmotor ist und wie er funktioniert, kann präzise, zuverlässige und wirtschaftliche Bewegungssysteme entwickeln. Besonders in CNC, 3D-Druck, Medizintechnik und industrieller Automatisierung bleibt der Schrittmotor deshalb eine äußerst relevante Lösung.[web:56][web:192][web:198]
Kontaktieren Sie HDBMOTOR, wenn Sie eine technische Empfehlung oder eine kundenspezifische Schrittmotor-Lösung für Ihre Anwendung benötigen.
FAQ
Was ist der wichtigste Vorteil eines Schrittmotors?
Der wichtigste Vorteil ist die präzise, impulsbasierte Positionierung. In vielen Anwendungen ist dafür kein zusätzlicher Encoder erforderlich.
Wie funktioniert ein Schrittmotor einfach erklärt?
Der Stator erzeugt nacheinander Magnetfelder. Der Rotor richtet sich Schritt für Schritt an diesen Magnetfeldern aus. So entsteht eine kontrollierte Drehbewegung.
Welcher Schrittmotortyp wird am häufigsten eingesetzt?
In industriellen Anwendungen wird meist der Hybrid-Schrittmotor verwendet, weil er gute Präzision, hohes Drehmoment und stabile Dynamik kombiniert.[web:192][web:198]
Wann sollte man Closed-Loop statt Open-Loop einsetzen?
Closed-Loop ist besonders sinnvoll bei wechselnden Lasten, hohen Drehzahlen und Anwendungen, in denen Schrittverluste vermieden werden müssen.[web:182][web:186]
Sind Schrittmotoren für hohe Drehzahlen geeignet?
Sie sind vor allem bei niedrigen und mittleren Drehzahlen stark. Mit steigender Drehzahl nimmt das verfügbare Drehmoment ab.
Verwandte Artikel:
Schrittmotor-Geräusche reduzieren mit HDBMOTOR
So wählen Sie einen besseren Extruder-Schrittmotor