
Die Schrittmotor Schrittwinkel Berechnungsformel ist eines der wichtigsten Konzepte in der Antriebstechnik. Der Schrittwinkel definiert die minimale mechanische Bewegung, die ein Schrittmotor bei einer Änderung der Statorwicklungserregung ausführt. Da Schrittmotoren in Automatisierung, CNC-Maschinen, 3D-Druckern, Halbleitergeräten und Präzisionspositioniersystemen weit verbreitet sind, ist das Verständnis von Schrittwinkel und seiner Berechnung für die Auswahl des richtigen Motors unerlässlich.
Siehe auch: HDB Motors – Ihr Partner für Präzisionsantriebe
1. Was ist der Schrittwinkel bei einem Schrittmotor?
Der Schrittwinkel ist der festgelegte Drehwinkel, den der Rotor bei jedem Erregungswechsel bewegt wird. Wenn die Statorwicklung den Strom zwischen den Phasen umschaltet, verschieben sich die Magnetfelder und ziehen den Permanentmagnet- oder Hybridrotor in die Ausrichtung. Diese kontrollierte und wiederholbare Bewegung definiert die grundlegende Auflösung des Motors.
Ein kleinerer Schrittwinkel bedeutet gleichmäßigere Bewegung, geringere Vibrationen und höhere Positioniergenauigkeit. Aus diesem Grund ist der Schrittwinkel einer der ersten Parameter, den Ingenieure bei der Motorauswahl prüfen.
2. Grundlegende Schrittwinkel-Berechnungsformel
Die einfachste und am weitesten verbreitete Formel zur Berechnung des Schrittwinkels lautet:
Schrittwinkel = 360° ÷ N
Dabei steht N für die Gesamtzahl der Magnetpole über alle Phasen. Sie berechnet sich wie folgt:
N = NPH × PH
NPH = Anzahl der Magnetpole pro Phase
PH = Anzahl der Statorphasen
N = Gesamtzahl der Magnetpole
Beispiel:
Ein 2-Phasen, 4-poliger Schrittmotor → N = 2 × 4 = 8
Schrittwinkel = 360° ÷ 8 = 45°
Wichtiger Hinweis für die Praxis: Die obige Formel ist didaktisch wertvoll, aber für moderne Hybrid-Schrittmotoren nicht direkt anwendbar. Diese nutzen eine Zahngeometrie an Rotor und Stator, um den effektiven Schrittwinkel auf 1,8° (200 Schritte/Umdrehung) oder 0,9° (400 Schritte/Umdrehung) zu reduzieren – unabhängig von der Polzahl. Die Formel für Hybrid-Schrittmotoren lautet: 360° ÷ (Phasen × Überzüge × Zähne).
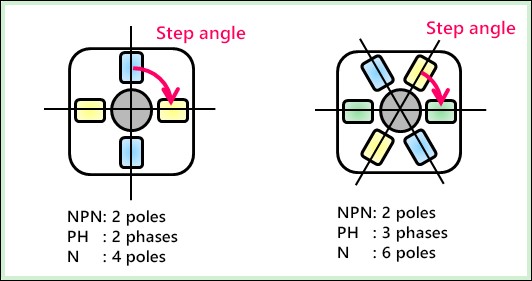
Links: Zweiphasiger / Vierpoliger Motor Rechts: Dreiphasiger / Sechspoliger Motor
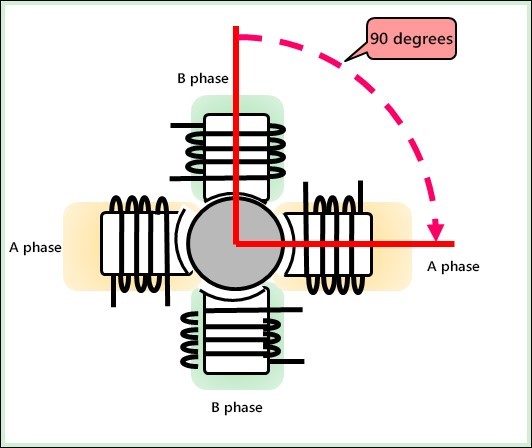
Bei einem zweiphasigen, vierpoligen Motor beträgt der Schrittwinkel 90 Grad. Der Schrittmotor rotiert durch kontinuierliches Ausführen aller Schritte.
3. Schrittwinkel bei Permanentmagnet- und Hybrid-Schrittmotoren
Die meisten Industriemotoren, einschließlich der Produktlinie von HDB Motors, verwenden Permanentmagnet- (PM) oder Hybridrotoren aufgrund ihrer hohen Effizienz und Präzision.
Für PM-Schrittmotoren lautet eine weitere gebräuchliche Formel:
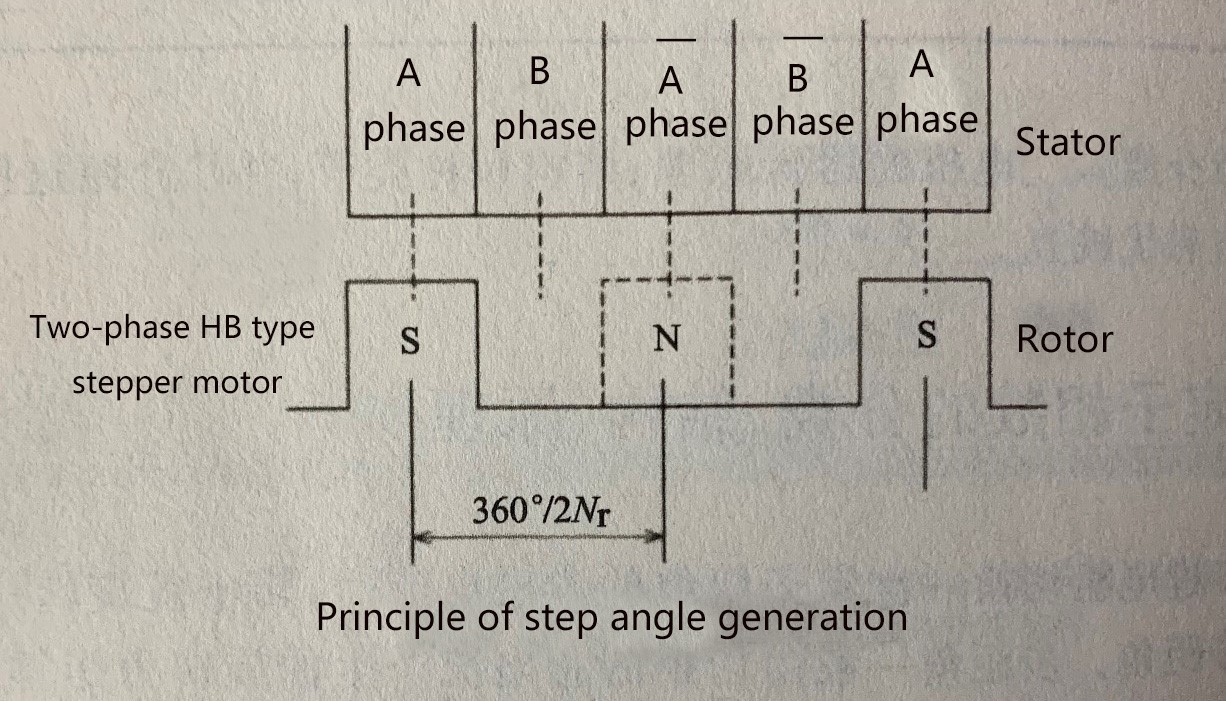
Schrittwinkel = 180° ÷ (P × Nr)
P = Anzahl der Statorphasen
Nr = Anzahl der Rotorpolpaare
Die physikalische Bedeutung ist einfach: Eine volle Umdrehung ist 360°. Die Division durch 2·Nr ergibt den mechanischen Winkel pro Rotorpol. Die Division durch die Anzahl der Phasen ergibt den Schrittwinkel. Diese Formel erklärt, warum eine Erhöhung der Rotorpolpaare zu kleineren Schrittwinkeln und verbesserter Auflösung führt.
4. Übliche industrielle Schrittwinkel und ihre Anwendungen
1,8° Schrittwinkel (200 Schritte pro Umdrehung)
Am häufigsten in der Automatisierung
Ideal für CNC, 3D-Drucker, Positioniertische
Ausgewogenes Verhältnis von Drehmoment und Auflösung
0,9° Schrittwinkel (400 Schritte pro Umdrehung)
Höhere Präzision
Reduzierte Vibrationen und gleichmäßigere Mikropositionierung
Geeignet für Halbleiterausrüstung, Inspektionssysteme und Präzisionsinstrumente
Mikroschritt-Treiber können diese Winkel weiter unterteilen und verbessern die Laufruhe – allerdings auf Kosten des Drehmoments.
Weitere Informationen zur Motordrehmoment-Berechnung: Unser Leitfaden Motor Drehmoment Berechnungsformel – 6 Schritte mit praktischem Beispiel hilft bei der präzisen Dimensionierung.
5. Bedeutung des Schrittwinkels in industriellen Anwendungen
Das Verständnis des Schrittwinkels hilft Ingenieuren:
Erreichbare Positioniergenauigkeit zu bestimmen
Einen mit den mechanischen Auflösungsanforderungen kompatiblen Motor auszuwählen
Die Motorleistung an die Lastträgheit anzupassen
Laufruhe und Geräuschverhalten zu verbessern
Kompatibilität mit der Controller-Schrittfrequenz sicherzustellen
Hinweis zur Leistungssteigerung mit Getrieben: Unser Artikel Getriebeschrittmotor – 5 entscheidende Vorteile für Präzisionsanwendungen zeigt, wie Sie mit Getrieben Drehmoment und Laufruhe weiter verbessern können.
Mehr zur Sinussteuerung für gleichmäßige Rotation: Unser Leitfaden Schrittmotor Sinussteuerung – sanfte Rotation in 4 Schritten erklärt die Implementierung sinusförmiger Bewegungsprofile.
6. Grenzen der Schrittwinkelverbesserung
Um einen kleineren Schrittwinkel zu erreichen, gibt es zwei Strategien:
Erhöhung der Anzahl der Statorphasen
Erhöhung der Anzahl der Rotorpolpaare
Die Rotorpolzahl ist jedoch durch fertigungstechnische Einschränkungen begrenzt. Daher kombinieren hochpräzise Motoren oft optimiertes Rotordesign mit mehrphasigen Statorsystemen und Mikroschritt-Technologie.
Siehe auch unser vollständiges Glossar: Elektromotor Fachbegriffe – Das Glossar für Ingenieure.
Fazit
Die Schrittmotor Schrittwinkel Berechnungsformel ist essenzielles Wissen für Ingenieure, die Bewegungsteuerungssysteme entwerfen. Der Schrittwinkel bestimmt die Auflösung, beeinflusst Vibrationen und wirkt sich direkt auf die Positioniergenauigkeit aus. Egal, ob Sie mit 1,8°-Motoren, 0,9°-Motoren oder kundenspezifischen hochauflösenden Typen arbeiten – das Verständnis der Schrittwinkelformeln hilft bei der korrekten Motorauswahl für Automatisierung, Robotik, CNC-Maschinen und Präzisionsgeräte.
Wenn Sie Hilfe bei der Auswahl des richtigen Schrittmotors benötigen, bietet HDB Motors Auswahlberatung und kundenspezifische Motoren basierend auf Drehmoment, Geschwindigkeit, Last und Auflösungsanforderungen.

Technische Beratung von HDB Motors
Benötigen Sie Unterstützung bei der Auswahl des richtigen Schrittmotors für Ihre Anwendung? Wir analysieren Ihre Anforderungen in den Bereichen Drehmoment, Geschwindigkeit, Last und Auflösung.