
HDB Motors bietet dieses umfassende Glossar der Elektromotor Fachbegriffe als technische Referenz für Ingenieure, Konstrukteure und technische Einkäufer an. Die Liste umfasst die wichtigsten Motorparameter und Fachbegriffe aus den Bereichen Schrittmotor, Servomotor und allgemeine Antriebstechnik.
Siehe auch: HDB Motors – Ihr Partner für Präzisionsantriebe
Elektromotor Fachbegriffe von A bis Z
Absolute Position: Position bezogen auf einen festen Null- oder Referenzpunkt (Home-Position).
Absolute Programmierung: Positionierungskoordinaten-Referenzsystem, bei dem alle Positionen relativ zu einem Referenzpunkt angegeben werden.
Ambient Temperature (Umgebungstemperatur): Temperatur des Mediums, das ein Gerät unmittelbar umgibt.
Amplifier (Verstärker): Elektronisches Gerät, das Befehlssignale in hochleistungsfähige Spannungen und Ströme für den Motor umwandelt.
ASCII: Amerikanischer Standardcode für den Informationsaustausch; ermöglicht die Datenübertragung zwischen Maschinen.
Axial Play (Axialspiel): Axiale Wellenverschiebung durch Umkehr einer axialen Kraft auf die Welle.
Baud Rate: Anzahl der pro Sekunde übertragenen Binärbits für serielle Kommunikation wie RS-232.
Bi-level Drive (Zweispannungstreiber): Treiber, bei dem zwei Spannungspegel zur Ansteuerung eines Schrittmotors verwendet werden.
Bipolar Drive (Bipolarer Treiber): Treiber, der die magnetische Polarität eines Pols durch elektronisches Umschalten der Stromrichtung umkehrt.
Brushless Servo Drive (Bürstenloser Servotreiber): Servotreiber zur Steuerung eines permanentmagneterregten Synchronmotors.
Chopper Drive (Choppertreiber): Schrittmotor-Treiber, der Schaltverstärker zur Stromregelung verwendet.
Class B Insulation (Isolationsklasse B): Motorisolierung, ausgelegt für Betrieb bis 130°C.
Class H Insulation (Isolationsklasse H): Motorisolierung, ausgelegt für Betrieb bis 180°C.
Closed Loop (Geschlossener Regelkreis): System mit Rückkopplung zur Überwachung und Korrektur von Abweichungen zwischen Ist- und Sollwert.
Cogging (Rastmoment): Ungleichmäßige Geschwindigkeit bei Motoren, insbesondere bei niedrigen Drehzahlen.
Commutation (Kommutierung): Steuerung von Strömen oder Spannungen zu den richtigen Motorphasen zur Erzeugung optimalen Drehmoments.
Controller (Stepper Motor): System aus Gleichstromversorgung, Leistungsschaltern und zugehörigen Steuerschaltungen.
Damping (Dämpfung): Maß für die Abklingrate eines Signals auf seinen stationären Wert.
Dead Band (Totband): Bereich von Eingangssignalen, auf den das System nicht reagiert.
Detent Torque (Rastmoment): Maximales Drehmoment zum langsamen Drehen einer nicht bestromten Schrittmotorwelle.
Drive (PWM): Motorantrieb mit Pulsweitenmodulation zur Stromregelung.
Drive (Servo): Motorantrieb mit Positionsrückkopplung zur präzisen Positions- und/oder Geschwindigkeitsregelung.
Drive (Stepper): Elektronik zur Umwandlung digitaler Schritt- und Richtungseingänge in Ströme für den Schrittmotor.
Duty Cycle (Einschaltdauer): Prozentualer Anteil der Einschaltzeit im Verhältnis zur Ausschaltzeit.
Dynamic Braking (Dynamische Bremse): Passives Bremsverfahren bei Permanentmagnetmotoren durch Kurzschließen der Motorwicklungen.
Encoder (Drehgeber): Gerät zur Umwandlung von Bewegung in elektrische Signale für Positionsinformationen.
Encoder Marker Pulse (Referenzimpuls): Einmal-pro-Umdrehung Signal zur Referenzpunktbestimmung.
End Play (Endspiel): Axiale Wellenbewegung durch Richtungsumkehr einer Axialkraft.
Following Error (Schleppfehler): Positionsabweichung während der Bewegung zwischen Ist- und Sollposition.
Friction – Coulomb (Coulomb-Reibung): Bewegungsviderstand zwischen ungeschmierten Oberflächen, geschwindigkeitsunabhängig.
Friction – Viscous (Viskoose Reibung): Bewegungsviderstand zwischen geschmierten Oberflächen, proportional zur Relativgeschwindigkeit.
Hall Sensors (Hall-Sensoren): Rückmeldungssystem im Motor zur elektronischen Kommutierung durch den Servoverstärker.
Holding Torque (Haltemoment): Maximales Rückstellmoment des bestromten Motors bei langsamer externer Wellendrehung.
Hybrid Stepper Motor (Hybrid-Schrittmotor): Schrittmotortyp mit Permanentmagnet und Reluktanz-Stator- und Rotorstrukturen.
Hysteresis (Positional) (Hysterese): Differenz der Schrittpositionen bei Bewegung im und gegen den Uhrzeigersinn.
I/O (Inputs/Outputs): Empfang und Übertragung von Informationen zwischen Steuergeräten (digital oder analog).
Idle Current Reduction (Ruhestromreduzierung): Reduzierung des Phasenstroms bei Schrittmotoren ohne Bewegung.
Indexer (Indexierer): Elektronisches Steuergerät, das Puls- und Richtungssignale für Schrittmotortreiber sendet.
Inductance (Mutual) (Gegeninduktivität): Eigenschaft zwischen zwei stromdurchflossenen Leitern bei Verkettung ihrer magnetischen Flusslinien.
Inductance (Self) (Selbstinduktivität): Konstante zur Berechnung der selbstinduzierten Gegen-EMK aus der Stromänderungsrate.
Inertia (Trägheit): Maß für den Widerstand eines Objekts gegen Geschwindigkeitsänderungen.
Inertial Match (Trägheitsanpassung): Verhältnis von reflektierter Lastträgheit zu Motorträgheit.
Instantaneous START/STOP Rate (Sofort-Start/Stop-Rate): Maximale Schaltfrequenz für lastfreie Schrittmotoren ohne Schrittverluste.
L/R Drive (L/R-Treiber): Treiber mit externem Widerstand zur Erhöhung der Spannung gegenüber einem Spannungstreiber.
Loop, PID (PID-Regelkreis): Hochleistungsregelkreis mit Proportional-, Integral- und Differentialparametern.
Loop, Position (Positionsregelkreis): Rückkopplungsregelkreis mit Motorposition als Regelgröße.
Loop, Velocity (Drehzahlregelkreis): Rückkopplungsregelkreis mit Geschwindigkeit als Regelgröße.
Maximum Reversing Rate (Maximale Reversierrate): Maximale Schrittfrequenz für Richtungsumkehr ohne Schrittverluste.
Maximum Slew Rate (Maximale Schleuderlaufrate): Maximale Schrittfrequenz für synchronen Betrieb eines unbelasteten Schrittmotors.
Microstepping (Mikroschritt): Elektronische Unterteilung von Motorsprüngen durch den Treiber in kleinere Schritte.
Open Frame Drive (Offener Rahmen): Verstärker, für den eine externe Gleichstromquelle bereitgestellt werden muss.
Open-Loop (Offener Regelkreis): System ohne Rückkopplung – die meisten Schrittmotorsysteme arbeiten in diesem Modus.
Oscillator (Oszillator): Gerät zur Erzeugung von Pulsen für Schrittmotoren mit voreingestellter Geschwindigkeit.
Overshoot (Überschwinger): Betrag, um den die Motorwelle über die Sollposition hinausdreht.
Packaged Drive (Kompletttreiber): Verstärker mit integriertem Netzteil für 110/220VAC.
Permanent Magnet Step Motor (Permanentmagnet-Schrittmotor): Schrittmotor mit Permanentmagnet-Läufer und bewickeltem Stator.
Pull-In Rate (Einzugsrate): Maximale Schaltfrequenz für lastfreie Schrittmotoren ohne Schrittverluste beim Start.
Pull-In Torque (Einzugsmoment): Maximales Drehmoment für synchronen Start und Betrieb eines Schrittmotors.
Pull-out Torque (Ausreißmoment): Maximales Drehmoment bei synchronem Betrieb eines Schrittmotors mit fester Schrittfrequenz.
Pulse Rate (Impulsrate): Rate aufeinanderfolgender Schritte oder Wicklungsumschaltungen.
PWM (Pulse Width Modulation): Methode zur Steuerung von Motorspannung und -strom in Servo- und Schrittmotortreibern.
Radial Play (Seitenspiel): Seitliche Wellenbewegung durch Lagerluft und andere mechanische Toleranzen.
Ramping (Rampen): Beschleunigung und Verzögerung eines Motors bzw. Frequenzänderung des Schrittimpulszugs.
Rated Torque (Nenndrehmoment): Drehmomentfähigkeit eines Motors bei gegebener Drehzahl; maximales Dauer-Drehmoment.
Regeneration (Rückspeisung): Energiefluss vom Motor zurück zum Verstärker beim Abbremsen – der Motor arbeitet als Generator.
Repeatability (Wiederholgenauigkeit): Grad der reproduzierbaren Positioniergenauigkeit für wiederholte Bewegungen.
Resolution (Auflösung): Kleinster erreichbarer Positionierschritt, oft als Schritte oder Rückmeldeeinheiten pro Umdrehung definiert.
Resonance (Resonanz): Effekt einer periodischen Antriebskraft, der bei einer bestimmten Frequenz zu großer Amplitudenzunahme führt.
Response Rate (Ansprechrate): Schrittfrequenz, der ein unbelasteter Motor aus dem Stand folgen kann.
Ringing (Nachschwingen): Oszillation eines Systems nach einer plötzlichen Zustandsänderung.
RS-232, RS-422/485: Serielle Kommunikations-Hardwaredefinitionen.
Serial Port (Serielle Schnittstelle): Digitaler Datenkommunikationsport mit seriellem Bitstrom zur Datenübertragung.
Servo Amplifier/Servo Drive (Servoverstärker): Elektronisches Gerät, das ein Steuersignal in Motorstrom zur Drehmoment-Erzeugung wandelt.
Servo System (Servosystem): Rückkopplungsregelsystem für mechanische Bewegung mit Position oder Geschwindigkeit als Regelgröße.
Settling Time (Einschwingzeit): Zeit von Ankunft an der Sollposition bis zum Abklingen der Schwingungen innerhalb eines Toleranzbands.
Slew (Schleuderlauf): Bewegungsabschnitt mit konstanter, von Null verschiedener Geschwindigkeit.
Stall Torque (Blockiermoment): Verfügbares Drehmoment eines Motors im Stillstand (0 U/min).
Step Angle (Schrittwinkel): Nominaler Winkel zwischen benachbarten Schrittpositionen eines Schrittmotors.
Step or Stepping Rate (Schrittfrequenz): Anzahl der Wellenschritte während eines bestimmten Zeitintervalls.
Step-to-step Accuracy (Schrittgenauigkeit): Maximaler Fehler zwischen benachbarten Schritten, prozentual eines Vollschritts.
Switching Amplifier (Schaltverstärker): Gerät, das eine hohe Spannung zur Stromregelung ein- und ausschaltet.
Switching Sequence (Schaltfolge): Reihenfolge und Polarität der an die Schrittmotorspulen angelegten Spannungen.
Thermal Time Constant (Thermische Zeitkonstante): Zeit, bis die Motorwicklung 63,2% ihrer Endtemperatur erreicht.
Thermal Resistance (Wärmewiderstand): Widerstand gegen Energiefluss zwischen zwei Körpern; Einheit °C/W in der Wicklung.
Torque (Drehmoment): Drehende Entsprechung der Kraft; Produkt aus Kraft und Hebelarm.
Torque Constant (Drehmomentkonstante): Beziehung zwischen Motoreingangsstrom und Ausgangsdrehmoment (Einheit Drehmoment/Strom).
Torque Displacement Curve (Drehmoment-Kennlinie): Haltemoment als Funktion der Rotorwinkelauslenkung.
Torque Gradient (Drehmomentgradient): Verhältnis von Haltemomentänderung zu bestimmter Wellenpositionsänderung bei bestromtem Motor.
Torque Ripple (Drehmomentwelligkeit): Zyklische Schwankung des erzeugten Drehmoments.
Torque-to-inertia Ratio (Drehmoment-Trägheitsverhältnis): Kennzahl für Beschleunigungsfähigkeit eines Motors.
Unipolar Drive (Unipolarer Treiber): Motorphasenstrom nur in eine Richtung geschaltet; benötigt 6- oder 8-adrige Motoren.
Variable Reluctance Step Motor (Reluktanz-Schrittmotor): Schrittmotor mit gewickeltem Stator und Weicheisen-Rotor.
Velocity (Geschwindigkeit): Positionsänderung pro Zeiteinheit mit Betrag und Richtung.
Viscous Damping (Viskoose Dämpfung): Dämpfer mit schlepp- oder reibungsmomentproportionaler Beschleunigung.
Voltage Drive (Spannungstreiber): Treiber mit minimaler Spannung zur Strombegrenzung.
Wave Drive (Wellenantrieb): Nacheinander-Bestromung einzelner Phasen.
Trägheitsumrechnungstabellen
Um von Einheit A in Einheit B umzurechnen, multiplizieren Sie mit dem Eintrag in der Tabelle.
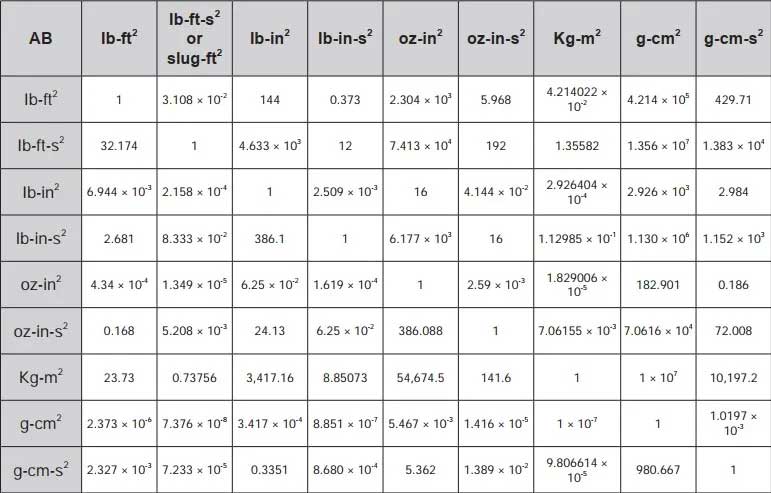
Beispiel:
Umrechnung eines Rotorträgheitsmoments von 90 g-cm² in oz-in-s²
Der Multiplikator aus obiger Tabelle beträgt 1,416 × 10⁻⁵
Das neue Trägheitsmoment ist 90 × 1,416 × 10⁻⁵ = 1,27 × 10⁻³ oz-in-sec²
Mehr zur Drehmomentberechnung: Unser Leitfaden Motor Drehmoment Berechnungsformel – 6 Schritte mit praktischem Beispiel hilft bei der präzisen Dimensionierung.
Drehmomentumrechnungstabellen
Um von Einheit A in Einheit B umzurechnen, multiplizieren Sie mit dem Eintrag in der Tabelle.
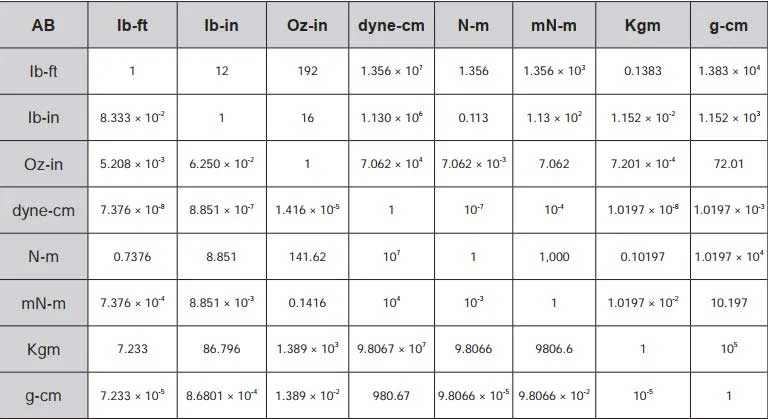
Beispiel:
Umrechnung eines Drehmoments von 53 oz-in in kg-cm
Der Multiplikator aus obiger Tabelle beträgt 7,201 × 10⁻²
Der neue Drehmomentwert ist 53 × 7,201 × 10⁻² = 3,816 kg-cm
Hinweis zur Leistungssteigerung mit Getrieben: Unser Artikel Getriebeschrittmotor – 5 entscheidende Vorteile für Präzisionsanwendungen zeigt, wie Sie mit Getrieben Drehmoment und Laufruhe weiter verbessern können.
Weitere Informationen zur Sinussteuerung: Unser Leitfaden Schrittmotor Sinussteuerung – sanfte Rotation in 4 Schritten erklärt die Implementierung sinusförmiger Bewegungsprofile.
Technische Beratung von HDB Motors
Benötigen Sie Unterstützung bei der Motorauswahl oder haben Sie Fragen zu Fachbegriffen? Wir analysieren Ihre Anwendung und empfehlen die optimale Lösung.