

Hauptsteuerchip: Verwendet einen 32-Bit-DSP-Chip, der speziell für die Schrittmotorsteuerung entwickelt wurde.
Spannung und Strom:
Eingangsspannung: 12~48 VDC
Ausgangsstrom: 0,3 A ~ 2,2 A (Spitze)
Mikroschritteinstellungen: 16 Mikroschrittstufen wählbar (200–25.600 Impulse pro Umdrehung).
Antworthäufigkeit: Impulsantwortfrequenz bis zu 500 kHz.
Signalspannung: Puls-/Richtungs-/Aktivierungssignale kompatibel mit 5 V ~ 24 V DC, keine zusätzlichen Strombegrenzungswiderstände erforderlich.
Steuermodi: Einzelimpuls (Impuls + Richtung), Doppelimpuls (CW/CCW).
Produkt-Selbsttest: DIP-Schaltereinstellungen für Selbsttest (Motor läuft wiederholt vorwärts und rückwärts mit 30 U/min).
Resonanzunterdrückung: Berechnet automatisch Resonanzpunkte, um Vibrationen mittlerer/niedriger Frequenz zu unterdrücken.
Drehmomentglättung: Analysiert die Drehmomentwelligkeit bei niedriger Drehzahl und eliminiert entsprechende harmonische Komponenten, um eine gleichmäßige Bewegung bei niedriger Drehzahl zu erreichen.
Signalglättung: Dynamische Filterung von Geschwindigkeits- und Richtungssignalen für eine stabilere Systemleistung.
Aktuelle Kontrolle: PID-Stromregelung für Hochgeschwindigkeits- und Drehmomentabgabe bei geringem Geräuschpegel, geringer Vibration und geringer Wärmeentwicklung.
Selbsttest des Systems: Erkennt und passt Motorparameter automatisch an und optimiert den Motoreingangsstrom in Echtzeit entsprechend den Lastbedingungen.
Mikroschritt-Interpolation: Reduziert Vibrationen im Betrieb und verbessert die Laufruhe.
Motorkompatibilität: Der S-224D Zweiphasen-Schrittmotor ist für 4-, 6- oder 8-Draht-Zweiphasen-Schrittmotoren mit einem Außendurchmesser von 42 mm oder weniger und einem Nennstrom zwischen 0,3 A und 2,2 A geeignet.
Im Allgemeinen hängt die Auswahl eines Schrittmotors hauptsächlich von seinem Drehmoment und Nennstrom ab. Das Drehmoment wird durch die Motorgröße bestimmt – größere Motoren haben ein höheres Drehmoment. Der Strom hängt hauptsächlich von der Induktivität ab; Motoren mit geringerer Induktivität haben einen höheren Strom und eine bessere Leistung bei hohen Drehzahlen.
Anwendungsfelder: Weit verbreitet in Automatisierungsgeräten in Maschinen, Elektronik, Präzisionsinstrumenten, Messgeräten, medizinischen Instrumenten usw. verwendet. Beispiele hierfür sind lineare Schlitten, elektronische Geräte, optische Instrumente, Lasergeräte, Sicherheitssysteme, Schweißmaschinen, Ausgabegeräte und automatische Montagegeräte. Es eignet sich besonders gut für Anwendungen, die geringe Geräuschentwicklung und mittlere bis hohe Geschwindigkeit erfordern.
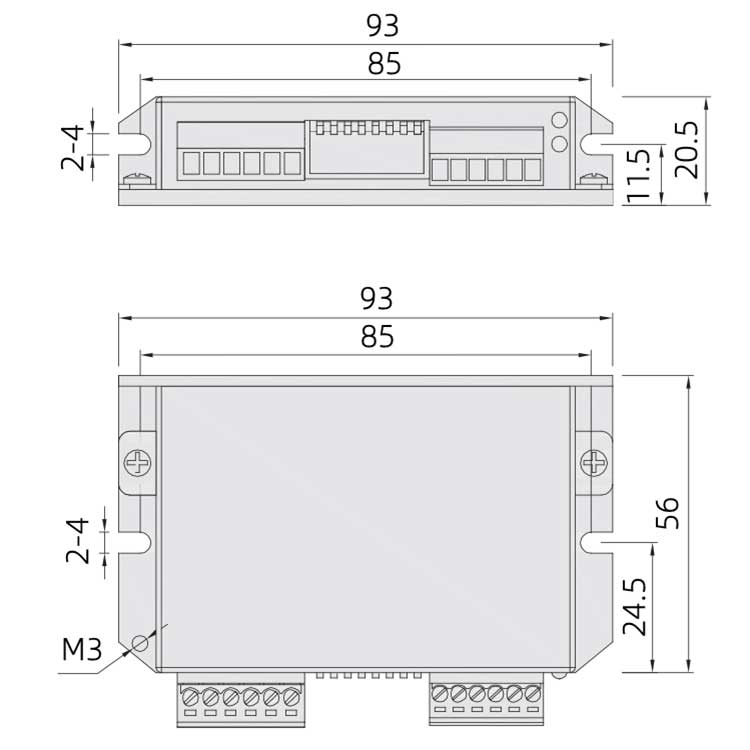
Abmessungen
Verkabelungsanweisungen
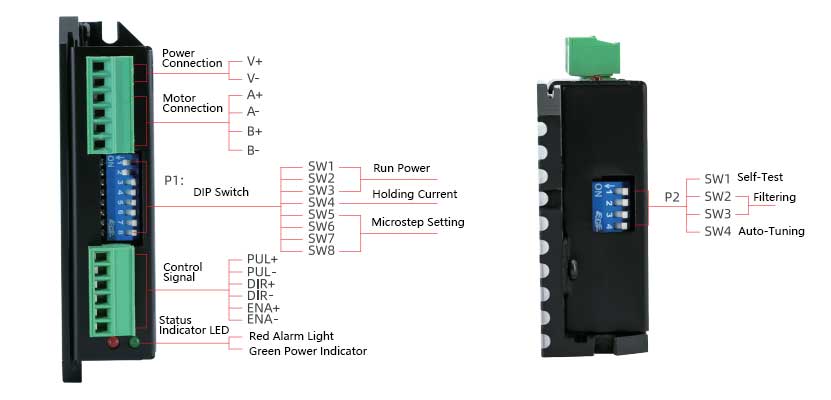
1) Motor- und Stromeingangsklemmen
| Terminalnummer | Symbol | Name | Beschreibung |
|---|---|---|---|
| 1 | V+ | Gleichstromeingang | +12 VDC ~ +48 VDC |
| 2 | V- | Stromerde | 0V |
| 3 | A+ | Motorspule der Phase A + | Durch Vertauschen der Verkabelung derselben Phasenspule kann sich die Drehrichtung des Motors ändern. Zum Beispiel das Vertauschen der Anschlüsse von A+ und A-. |
| 4 | A- | Motorspule der Phase A - | |
| 5 | B+ | Motorspule der Phase B + | |
| 6 | B- | Motorspule der Phase B - |
2) Steuersignalklemmen
| Terminalnummer | Symbol | Name | Beschreibung |
|---|---|---|---|
| 1 | PUL+ | Pluspol des Impulseingangs | Kompatibel mit DC 5~24V |
| 2 | PUL- | Minuspol des Impulseingangs | Kompatibel mit DC 5~24V |
| 3 | DIR+ | Positiver Anschluss für Richtungseingang | Kompatibel mit DC 5~24V |
| 4 | DIR- | Minuspol des Richtungseingangs | Kompatibel mit DC 5~24V |
| 5 | ENA+ | Aktivieren Sie den positiven Eingangsanschluss | Kompatibel mit DC 5~24V |
| 6 | ENA- | Aktivieren Sie den negativen Eingangsanschluss | Standardmäßige Floating-Aktivierung |
3) Statusanzeigen
Die grüne LED ist die Betriebsanzeige. Wenn der Treiber eingeschaltet ist, blinkt diese LED; Wenn der Treiber ausgeschaltet ist, erlischt diese LED.
Die rote LED ist die Fehleranzeige. Wenn ein Fehler auftritt, blinkt diese Anzeige-LED periodisch; Wenn der Fehler vom Benutzer behoben wird, bleibt die rote LED aus. Die Anzahl der roten LED-Blinksignale stellt unterschiedliche Fehlerinformationen dar, wie in der folgenden Tabelle dargestellt:
● Der Rot LED ● Der Grün LED
| NEIN. | LED-Blitzmuster | Fehlerbeschreibung | Lösung |
|---|---|---|---|
| 1 | ● Grüne LED leuchtet dauerhaft | Treiber nicht aktiviert | Geben Sie dem Treiber ein Aktivierungssignal |
| 2 | ●● Grüne LED blinkt | Der Treiber funktioniert normal | / |
| 3 | ●●● ●● 3 rot 2 grün | Interner Spannungsfehler | Erhöhen Sie die Stromversorgungskapazität |
| 4 | ●●●● ● 4 rot 1 grün | Überspannung am Treiberstromeingang | Reduzieren Sie die Versorgungsspannung |
| 5 | ●●●●● ● 5 rot 1 grün | Treiberüberstrom | Auf Kurzschluss oder Phasenfehler prüfen |
| 6 | ●●●● ●● 4 rot 2 grün | Unterspannung am Treiberstromeingang | Erhöhen Sie die Versorgungsspannung |
| 7 | ●●●●●● ● 6 rot 1 grün | Offener Stromkreis der Motorwicklung | Schließen Sie die Motorverkabelung ordnungsgemäß an |
Wenn der Treiber auf einen Fehler stößt, stoppt er den Betrieb und zeigt den entsprechenden Fehlercode an. Der Benutzer muss das Gerät aus- und wieder einschalten, um den Fehler zu beheben, oder den Fehler über das ENA-Offline-Signal löschen und dann den Treiber erneut aktivieren. Wenn ein Fehler auftritt, speichert der Treiber den letzten Fehler im EEPROM in einem Warteschlangenformat.