1,8° / Schritt
Flanschgröße: □42 mm
Winkelfehler: ±0,09°
Isolations-Spannungsfestigkeit: 500 V AC / 1 Minute
Isolationswiderstand: 100 MΩ
Max. Oberflächentemperatur des Motors: 100 °C
Luftfeuchtigkeitsbereich: 20 % rF – 90 % rF
Zulässige axiale Belastung: 10 N
Zulässige radiale Belastung: 25 N (bei 15 mm von der Montagefläche)
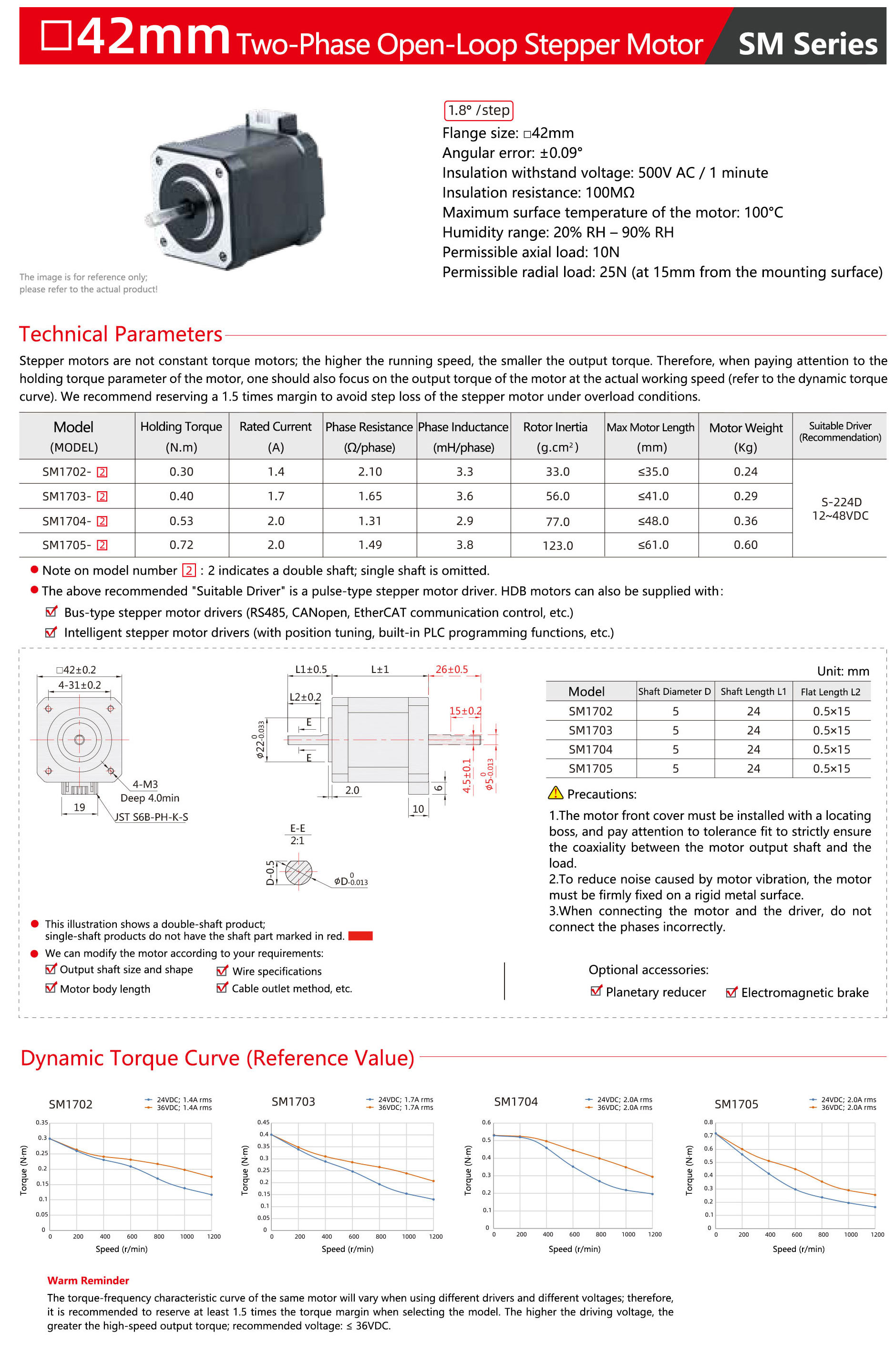
Technische Daten
Schrittmotoren sind keine Konstantdrehmomentmotoren; je höher die Drehzahl, desto geringer das Abgabedrehmoment. Daher sollte neben dem Haltedrehmoment des Motors auch das Abgabedrehmoment bei der tatsächlichen Arbeitsdrehzahl beachtet werden (siehe dynamische Drehmomentkennlinie). Wir empfehlen, eine Reserve von 1,5-fach einzuplanen, um Schrittverluste des Schrittmotors im Überlastbetrieb zu vermeiden.
Modell (MODELL) | Haltedrehmoment (N·m) | Nennstrom (A) | Phasenwiderstand (Ω/Phase) | Phaseninduktivität (mH/Phase) | Rotorträgheit (g·cm²) | Motorlänge max. (mm) | Motorgewicht (kg) | Geeigneter Treiber (Empfehlung) |
|---|---|---|---|---|---|---|---|---|
SM1702-② | 0,30 | 1,4 | 2,10 | 3,3 | 33,0 | ≤35,0 | 0,24 | S-224D 12~48 VDC |
SM1703-② | 0,40 | 1,7 | 1,65 | 3.6 | 56.0 | ≤41,0 | 0,29 | S-224D 12~48 VDC |
SM1704-② | 0,53 | 2,0 | 1,31 | 2,9 | 77,0 | ≤48,0 | 0,36 | S-224D 12~48 VDC |
SM1705-② | 0,72 | 2,0 | 1,49 | 3,8 | 123,0 | ≤61,0 | 0,60 | S-224D 12~48 VDC |
Hinweise
Hinweis zur Modellnummer „②“: Steht für eine zweifach Welle; eine einfach Welle wird nicht gekennzeichnet.
Die oben empfohlenen „Geeignete Treiber“ sind impulsgesteuerte Schrittmotortreiber. HDB Motors kann auch liefern:
Bus-fähige Schrittmotortreiber (RS485, CANopen, EtherCAT-Kommunikationssteuerung usw.)
Intelligente Schrittmotortreiber (mit Positionsoptimierung, integrierter PLC-Programmierfunktion usw.)