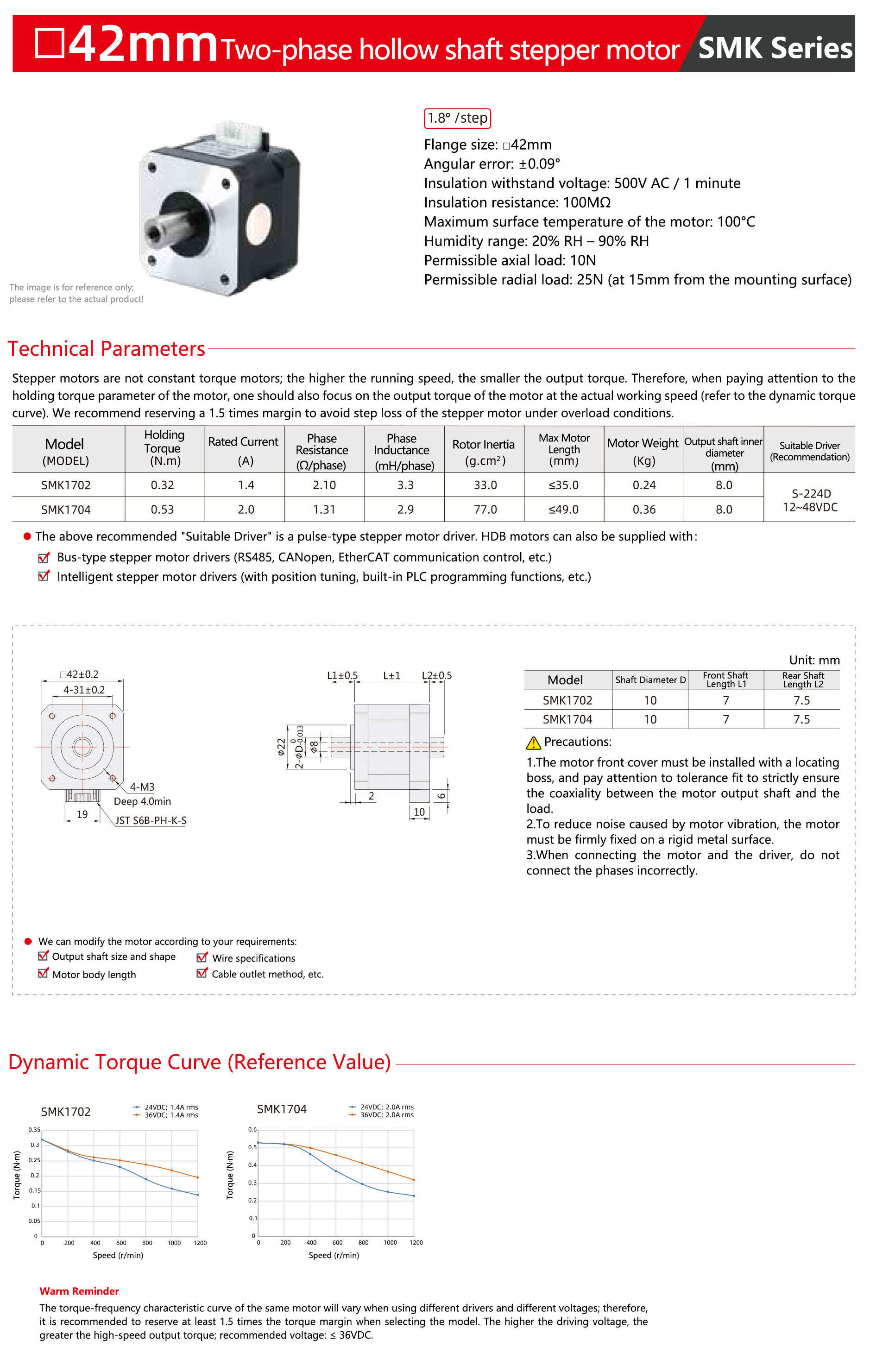
1,8° / Schritt
Flanschgröße: □42mm
Winkelfehler: ±0,09°
Isolationsfestigkeit: 500 V AC / 1 Minute
Isolationswiderstand: 100 MΩ
Maximale Oberflächentemperatur des Motors: 100°C
Luftfeuchtigkeitsbereich: 20 % RH – 90 % RH
Zulässige Axiallast: 10N
Zulässige Radiallast: 25 N (bei 15 mm Abstand zur Montagefläche)
Technische Parameter
Schrittmotoren sind keine Motoren mit konstantem Drehmoment; Je höher die Fahrgeschwindigkeit, desto kleiner das Ausgangsdrehmoment. Wenn man daher auf den Haltemomentparameter des Motors achtet, sollte man sich auch auf das Ausgangsdrehmoment des Motors bei der tatsächlichen Arbeitsgeschwindigkeit konzentrieren (siehe dynamische Drehmomentkurve). Wir empfehlen, einen 1,5-fachen Spielraum zu reservieren, um Schrittverluste des Schrittmotors bei Überlastbedingungen zu vermeiden.
Modell (MODELL) | Haltemoment (Nm) | Nennstrom (A) | Phasenwiderstand (Ω/Phase) | Phaseninduktivität (mH/Phase) | Rotorträgheit (g.cm²) | Maximale Motorlänge (mm) | Motorgewicht (kg) | Innendurchmesser der Abtriebswelle (mm) | Geeigneter Fahrer (Empfehlung) |
|---|---|---|---|---|---|---|---|---|---|
SMK1702 | 0,32 | 1.4 | 2.10 | 3.3 | 33,0 | ≤35,0 | 0,24 | 8,0 | - |
SMK1704 | 0,53 | 2,0 | 1.31 | 2.9 | 77,0 | ≤49,0 | 0,36 | 8,0 | - |
Geeignete Treiberempfehlung für diese Modelle ist S-224D, 12~48 VDC
Notizen
Der oben empfohlene „geeignete Treiber“ ist ein Schrittmotortreiber vom Impulstyp. Auch HDB-Motoren sind lieferbar:
Bus-Schrittmotortreiber (RS485, CANopen, EtherCAT-Kommunikationssteuerung usw.)
Intelligente Schrittmotortreiber (mit Positionsabstimmung, integrierten SPS-Programmierfunktionen usw.)