
Wenn Sie wissen möchten, was ist ein Schrittmotor und wie er funktioniert, sind Sie hier richtig. Schrittmotoren werden in Automatisierung und Robotik wegen ihrer präzisen Positions- und Geschwindigkeitssteuerung weit verbreitet eingesetzt. Dieser Beitrag erklärt, was ein Schrittmotor ist, seinen Aufbau, Funktionsweise, Typen, Steuerungsmethoden und Anwendungen.
Was ist ein Schrittmotor?
Ein Schrittmotor ist ein offenes Steuerungssystem, das elektrische Impuls-Signale in Winkel- oder Linearschritte umwandelt. Durch Steuerung der Impulssequenz, -frequenz und -anzahl lassen sich Richtung, Geschwindigkeit und Drehwinkel präzise regeln. In Kombination mit Linearantrieben oder Getrieben ermöglicht er komplexe lineare Bewegungen.
Schrittmotor Aufbau
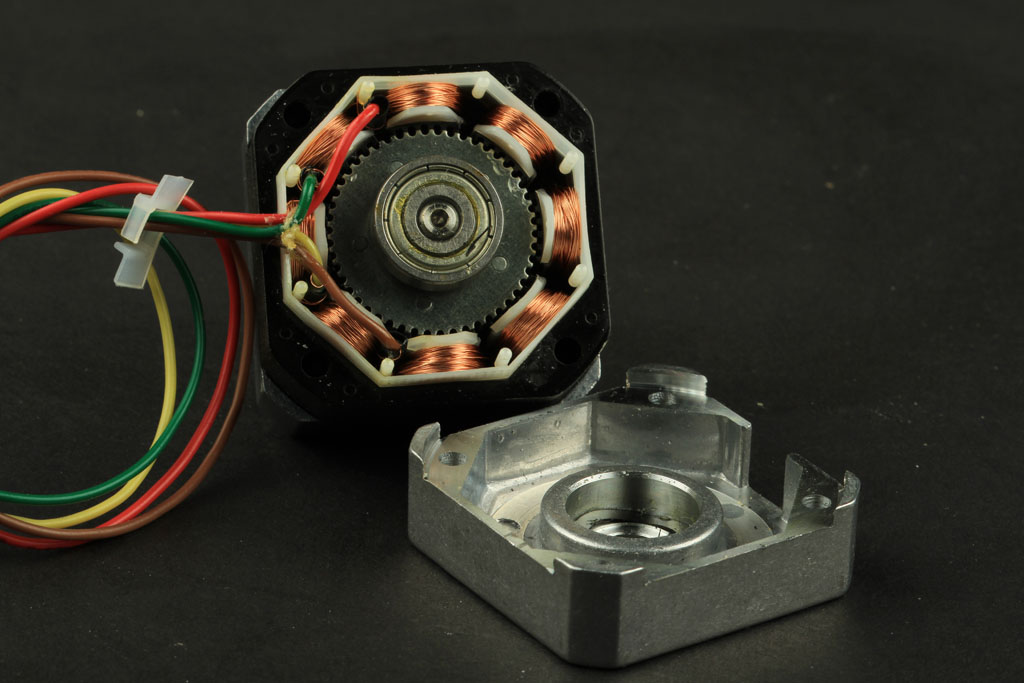
Ein typischer Schrittmotor besteht aus Vorder-/Hinterdeckel, Lagern, Mittelwelle, Rotorkern, Statorkern, Statorpaket, Wellenscheiben und Schrauben. Er wandelt elektrische Energie durch elektromagnetische Prinzipien in mechanische Bewegung um. Die um die Statorzähne gewickelten Spulen heißen Wicklungen oder Phasen.
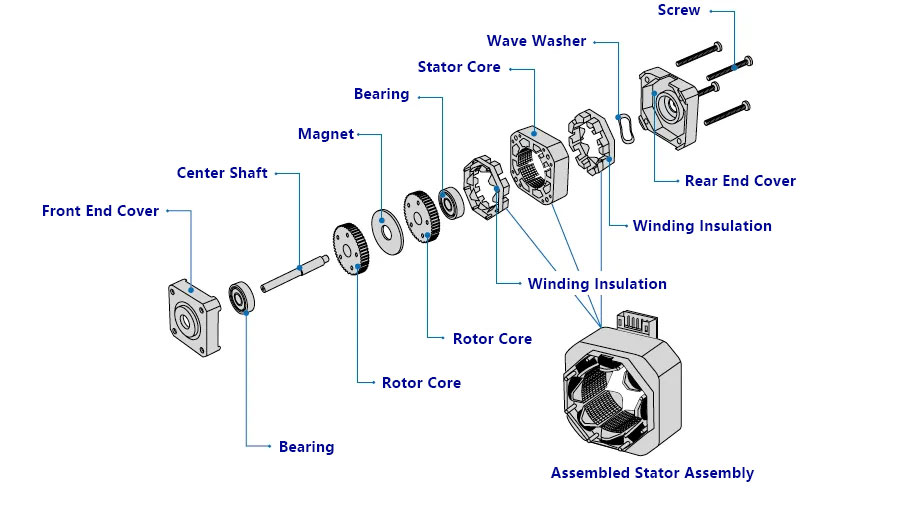
Schrittmotor Aufbau
Schrittmotor Innenaufbau-Diagramm
Wie funktioniert ein Schrittmotor?
Ein Schrittmotor hat zwei Hauptkomponenten: den festen Stator mit zahnradförmigen, spulenumwickelten Zähnen und den rotierenden Rotor (Permanentmagnet oder Reluktanz-Eisenkern). Bei Anregung einer Statorwicklung entsteht ein Magnetfeld, mit dem sich der Rotor ausrichtet. Durch sequentielle Anregung der Wicklungen bewegt sich der Rotor in präzisen Schritten.
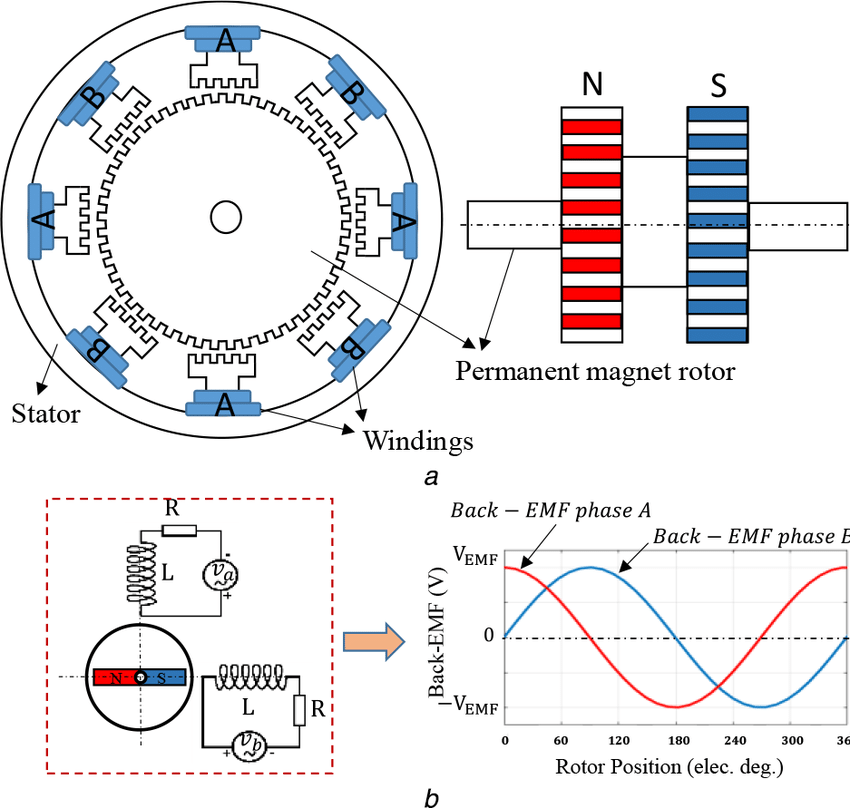
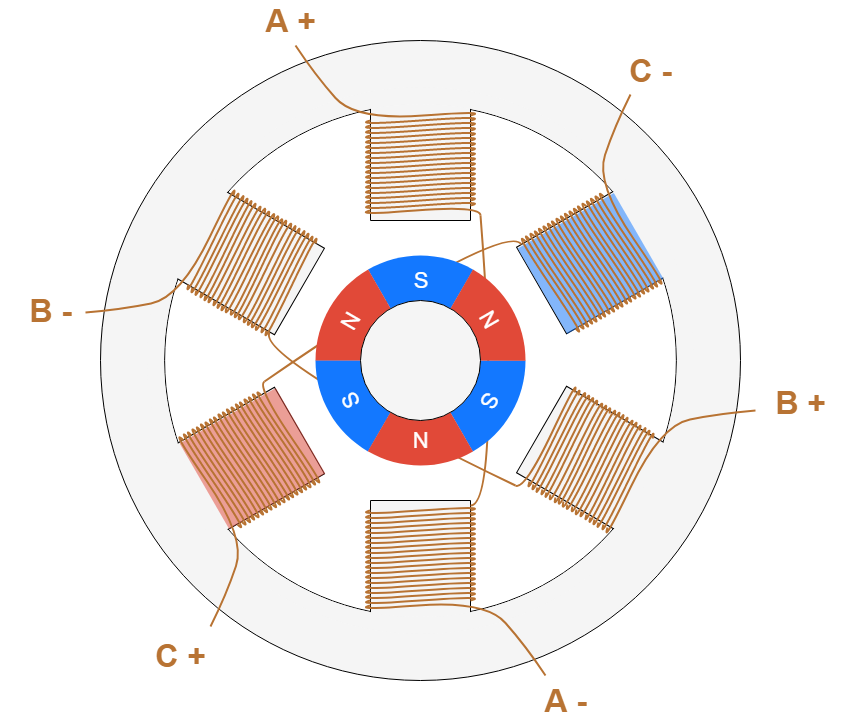
Schrittmotor Schaltplan

Vereinfachtes Innen-Schema
Beispiel: Spule A anregen → Rotor richtet sich aus; dann Spule B → Rotor dreht 60° im Uhrzeigersinn; Spule C folgt. Farbcodierte Statorzähne zeigen Magnetfeldrichtungen.
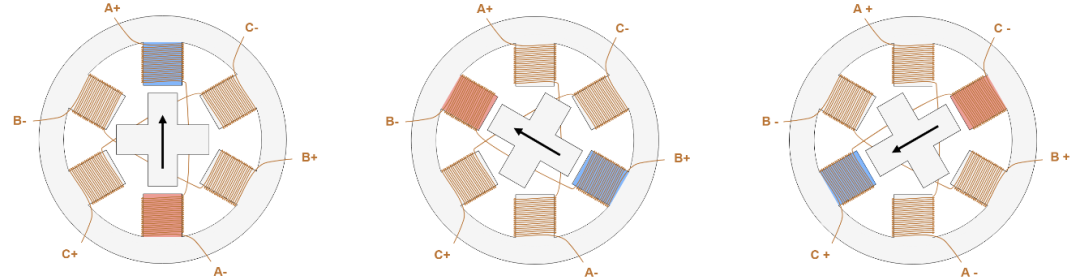
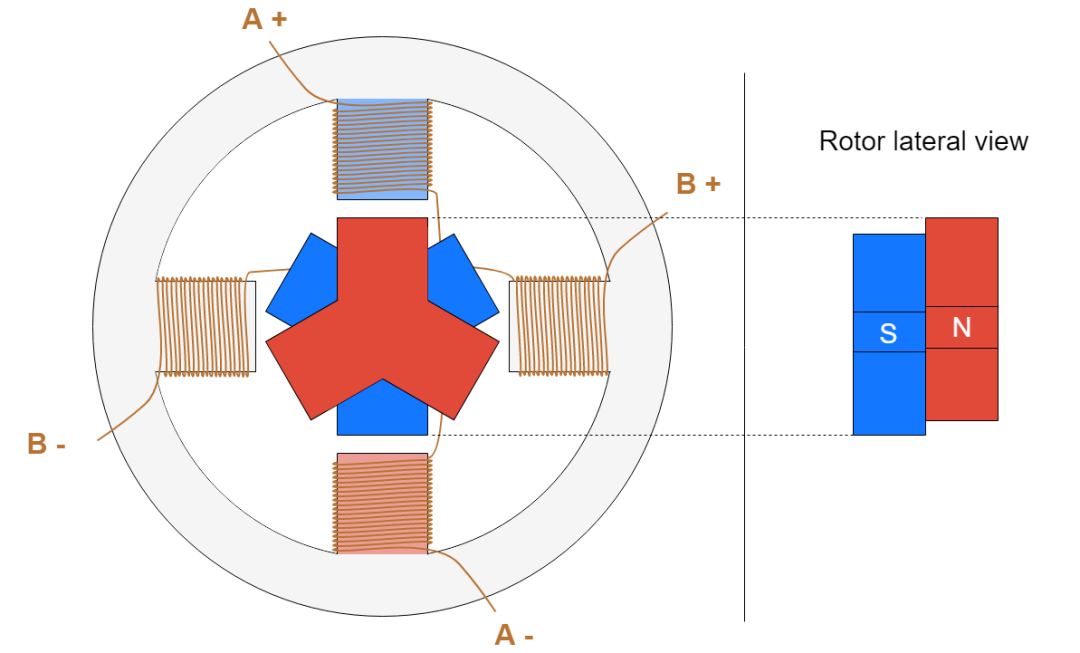
Rotationsprozess
Bei gleichzeitiger Anregung beider Phasen eines 1,8° Zweiphasenmotors bleibt der Rotor arretiert (Haltemoment). Stromumkehr in einer Phase → 1 Schritt (1,8°). 200 Schritte = 360°.
Rotationsprozess-Animation
Schrittmotor Typen
Nach Statorphasen: Ein-, Zwei-, Drei-, Vier-, Fünfphasig.
Nach Rotoraufbau:
Reluktanz-Schrittmotoren (VR): Hochpermeable Materialien, gezahnter Rotor/Stator. Kostengünstig, kleine Schrittwinkel (~1,5°), meist Dreiphasig, hohes Drehmoment aber lauter und schlechtere Dynamik.
Permanentmagnet-Schrittmotoren (PM): Mehrpoliger Zylinder-Permanentmagnet-Rotor, gezahnter Stator. Gute Dynamik, größere Schrittwinkel (7,5°/15°), Zweiphasig, kompakt.
Permanentmagnet-Schrittmotor
Hybrid-Schrittmotoren (HB): Kombiniert VR/PM-Vorteile, Zweiphasig (1,8°) oder Fünfphasig (0,72°). Seltene-Erden-Magnet-gezahnter Rotor. Hohe Leistung, kleine Schritte, gute Dynamik – ideal für Computer und Präzisionsgeräte.
Hybrid-Schrittmotor
Schrittmotor Steuerung
Schrittmotoren brauchen keine Gleichspannung, sondern Impuls-Signale. Drehwinkel proportional zu Impulsanzahl, Geschwindigkeit zu Frequenz.
Winkel vs. Impulse: Mehr Impulse = mehr Schritte.
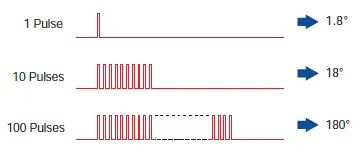
Winkel-zu-Impuls-Beziehung
Geschwindigkeit vs. Frequenz: Höhere Frequenz = höhere Geschwindigkeit (Vollstep).
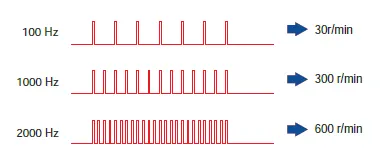
Geschwindigkeit-zu-Impuls-Beziehung
Treiber-ICs steuern: Einfache Anwendungen günstige Treiber, Präzisionssteuerung erweiterte Modelle.
Wofür wird ein Schrittmotor verwendet?
Wo präzise Winkelpositionierung gefragt ist:
Optische Laufwerke: Lesekopf-Bewegung
Drucker: Druckkopf-Positionierung
Lager-Roboter: Objekt-Handling
CNC-Maschinen: Spindel-Positionierung
NEMA-Baumotoren eignen sich besonders für solche Anwendungen. HDB Motors bietet Ein-, Zwei-, Drei-, Vier- und Fünfphasenmodelle sowie kundenspezifische Lösungen.
FAQ
Was ist ein Schrittmotor?
Ein Schrittmotor wandelt elektrische Impulse in präzise Winkel-/Linearschritte um – ideal für offene Steuerkreise ohne Rückmelde-Sensoren.
Welche Typen gibt es?
Reluktanz (VR), Permanentmagnet (PM) und Hybrid (HB). Hybrid bietet beste Leistung/Präzision.
Wie wird gesteuert?
Über Impulssequenz (Winkel), Frequenz (Geschwindigkeit). Treiber-ICs erforderlich.
Wo eingesetzt?
3D-Drucker, CNC, Robotik, Präzisionsmaschinen – überall, wo genaue Positionierung zählt.
Verwandte Artikel
NEMA 17 vs. NEMA 23 vs. NEMA 34