
Das Verständnis von Lastberechnung und Anwendungstipps für Schrittmotoren ist entscheidend, um die Motorleistung zu optimieren und einen stabilen Betrieb sicherzustellen. Schrittmotoren werden häufig in Präzisionsanwendungen eingesetzt, jedoch hängt ihre Effizienz stark von korrekten Drehmoment- und Trägheitsberechnungen, Drehmoment-Drehzahl-Kennlinien sowie einer optimalen Beschleunigungs- und Vibrationskontrolle ab.
Lastberechnung bei Schrittmotoren
Eine präzise Lastberechnung ist die Grundlage für die richtige Auswahl und Anwendung von Schrittmotoren. Zwei Hauptfaktoren beeinflussen die Motorleistung: Drehmomentlast und Trägheitslast.
Drehmomentlast (Tf)
Die Drehmomentlast wird wie folgt berechnet:
Tf = G × r
G: Gewicht der Last
r: Abstand vom Drehzentrum
Diese Formel beschreibt das notwendige Drehmoment zur Bewegung der Last.
Trägheitslast (TJ)
Die Trägheitslast beeinflusst das Beschleunigungsdrehmoment und wird berechnet durch:
TJ = J × (dw/dt)
J = M × (R1² + R2²) / 2
M: Masse des rotierenden Teils
R1: Außenradius
R2: Innenradius
dw/dt: Winkelbeschleunigung
Eine korrekte Berechnung der Trägheit ist entscheidend für die Bestimmung des erforderlichen Beschleunigungsdrehmoments.
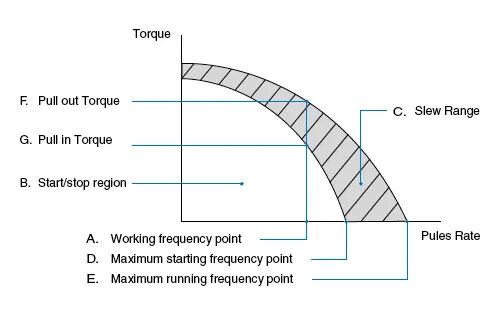
Drehmoment-Drehzahl-Kennlinie von Schrittmotoren
Die dynamische Drehmomentkurve ist entscheidend für das Verständnis der Motorleistung bei unterschiedlichen Drehzahlen.
Arbeitsfrequenzpunkt: n = q × Hz / (360 × D)
Start-/Stoppbereich: Direkt startbare Drehzahlen
Slew-Bereich: Beschleunigung erforderlich
Maximale Frequenz: Höchste erreichbare Drehzahl ohne Last
Pull-in / Pull-out Drehmoment: Start- und Betriebsgrenzen
Weitere Details zu elektrischen Eigenschaften finden Sie in unserem Artikel:Zusammenhang zwischen Drehmoment und Strom.
Berechnung des Beschleunigungsdrehmoments
Lineare Beschleunigung
TJ ≈ 70% des maximalen Motordrehmoments
tr = 1.8 × 10⁻⁵ × J × q × (F1 - F0) / (TJ - TL)
F(t) = (F1 - F0) × t / tr + F0
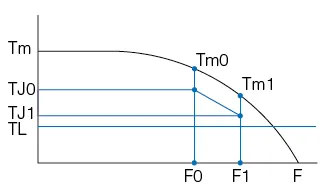
Exponentielle Beschleunigung
TJ0 = 70% Tm0, TJ1 = 70% Tm1
TL = 60% Tm1
tr = F4 × ln[(TJ0 - TL) / (TJ1 - TL)]
F(t) = F2 × [1 – e^(–t/F4)] + F0
Tipps zur Reduzierung von Vibration und Geräuschen
Resonanzbereiche vermeiden
Mikroschrittbetrieb verwenden für gleichmäßigere Bewegung
Spezielle Motoren einsetzen (z. B. 0,9° oder Mehrphasenmotoren)
Weitere Lösungen zur Vibrationsreduzierung finden Sie hier:Motorvibration Ursachen und Lösungen.
Fazit
Die richtige Anwendung von Lastberechnung und Tipps für Schrittmotoren gewährleistet eine zuverlässige und effiziente Leistung. Durch korrekte Drehmomentberechnung, Trägheitsanalyse und Vibrationskontrolle lassen sich optimale Ergebnisse erzielen.
Für professionelle Beratung und maßgeschneiderte Lösungen besuchen Sie unsere Website:HDB Motors Deutschland oder kontaktieren Sie uns direkt: Kontakt aufnehmen.
FAQ – Häufig gestellte Fragen
Wie berechnet man die Last eines Schrittmotors?
Die Last wird anhand von Drehmoment (Tf = G × r) und Trägheit berechnet. Beide Werte sind entscheidend für die richtige Motorauswahl.
Warum ist Trägheit bei Schrittmotoren wichtig?
Eine hohe Trägheit beeinflusst die Beschleunigung und kann zu Schrittverlusten führen, wenn sie nicht korrekt berücksichtigt wird.
Wie kann man Vibrationen reduzieren?
Durch Mikroschrittbetrieb, Anpassung der Frequenz und den Einsatz geeigneter Motoren lassen sich Vibrationen deutlich minimieren.