
Die richtigen Schrittmotor Auswahlparameter sind entscheidend für Ingenieure und Techniker in der industriellen Automatisierung und Fertigung. Bei der Auswahl eines geeigneten Schrittmotors reicht es nicht aus, nur den Antriebsstrom zu betrachten. Vielmehr müssen mehrere technische Faktoren wie Haltemoment, Antriebsmethode, Antriebsspannung und weitere zentrale Spezifikationen sorgfältig bewertet werden. In diesem Leitfaden stellen wir Ihnen die sieben wichtigsten Parameter vor, damit Sie den passenden Schrittmotor für Ihre Anwendung auswählen können.
1. Statisches Drehmoment von Schrittmotoren
Das statische Drehmoment ist das Drehmoment, das entsteht, wenn der Nennstrom die zweiphasigen Wicklungen des Motors erregt und der Rotor stillsteht. Es beschreibt die Fähigkeit des Motors, seine Position gegen äußere Kräfte zu halten, und entspricht in etwa der Leistungsangabe bei herkömmlichen Motoren. Motoren mit einem Drehmoment unter 0,8 N·m liegen häufig in den Baugrößen NEMA 8 bis NEMA 17. Modelle mit etwa 1 N·m werden oft als NEMA 23 ausgeführt, während höhere Drehmomentanforderungen eher NEMA 34, NEMA 42 oder größere Baugrößen erfordern.
2. Antriebsmethode für Schrittmotoren
Die Antriebsmethode hat einen großen Einfluss auf das Motorverhalten. Zu den gängigen Verfahren zählen Konstantspannungsantrieb, Konstantstromantrieb sowie unipolare und bipolare Wicklungskonfigurationen.
Konstantspannungsantrieb: Erfordert eine sorgfältige Abstimmung des Widerstands, damit kein zu hoher Strom fließt und der Treiber beschädigt wird.
Konstantstromantrieb: Wird bei Motoren mit niedrigem Widerstand und Nennströmen von typischerweise 1 bis 3 A eingesetzt und benötigt für höhere Ströme passende Treiber.
Unipolarer Antrieb: Nutzt vier Leistungstransistoren, wobei der Strom pro Spule nur in eine Richtung fließt. Diese Lösung eignet sich gut für Hochgeschwindigkeitsanwendungen.
Bipolarer Antrieb: Verwendet doppelt so viele Transistoren, damit sich die Stromrichtung umkehren lässt. Dadurch entsteht mehr Drehmoment bei niedrigen Drehzahlen, allerdings mit komplexerer Schaltung.
3. Antriebsspannung für Schrittmotoren
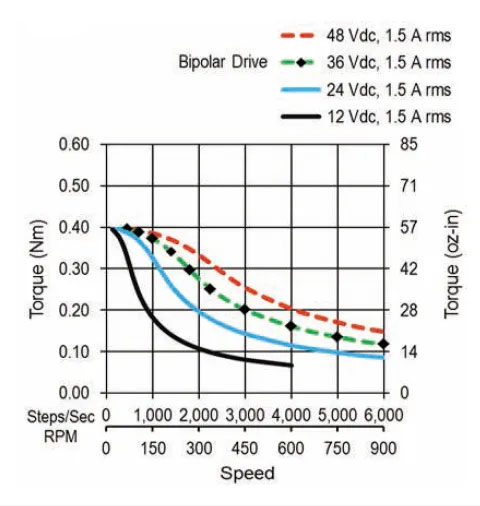
Die Antriebsspannung, also die Eingangsspannung des Motortreibers, kann stark variieren. Übliche Werte sind DC 12 V, 24 V, 48 V sowie AC 24 V, 36 V, 110 V und höhere Spannungen. Höhere Spannungen verbessern in der Regel das Drehmoment- und Geschwindigkeitsverhalten, insbesondere bei höheren Drehzahlen.
4. Antriebsstrom
Der Antriebsstrom, auch Phasenstrom genannt, ist der Strom, der durch jede Motorwicklung fließt. Selbst Motoren mit ähnlicher Baugröße und ähnlichem statischem Drehmoment können unterschiedliche Widerstands- und Stromwerte haben. Deshalb müssen Motor, Treiber und Netzteil immer gemeinsam betrachtet werden.
5. Drehmomentkennlinie von Schrittmotoren
Die Drehmoment-Frequenz-Kennlinie zeigt, wie das Drehmoment mit zunehmender Geschwindigkeit abnimmt. Schrittmotoren liefern bei niedrigen Drehzahlen ein hohes Drehmoment, verlieren bei höheren Drehzahlen jedoch an Kraft. Durch die richtige Auswahl von Antriebsspannung, Wicklungswiderstand und Induktivität lässt sich das Drehmoment für die jeweilige Anwendung optimieren.
6. Phasenzahl von Schrittmotoren
Die Phasenzahl, meist zwei oder drei Phasen, beeinflusst Schrittwinkel und Laufruhe. Zweiphasige Motoren arbeiten typischerweise mit Schrittwinkeln von 0,9° oder 1,8°, während dreiphasige Motoren häufig 1,2° bieten. Kleinere Schrittwinkel sorgen für einen ruhigeren Lauf, und dreiphasige Motoren werden oft in Anwendungen mit hoher Geschwindigkeit und hohem Drehmoment bevorzugt.
7. Leerlauf-Anlauffrequenz
Die Leerlauf-Anlauffrequenz, auch als Leerfrequenz bezeichnet, beschreibt die Fähigkeit des Motors, ohne Last bei einer bestimmten Geschwindigkeit anzulaufen. Anwendungen mit häufigem Start-Stopp-Betrieb bei etwa 1000 U/min profitieren von Motoren mit hoher Leerlauf-Anlauffrequenz, etwa Permanentmagnet- oder Reluktanzmotoren.
Verwandte Beiträge
Schrittmotor auswählen: 6 Tipps für optimale Leistung
Permanentmagnet-Schrittmotor: Aufbau und Funktionsweise
PM-, VR- und Hybrid-Schrittmotoren: Unterschiede, Aufbau und Auswahl
FAQ
Was ist der wichtigste Parameter bei der Auswahl eines Schrittmotors?
Das Haltemoment ist oft der wichtigste Ausgangspunkt, weil es zeigt, ob der Motor die Last im Stillstand sicher halten kann. Danach sollten Drehzahl, Strom, Spannung und Treiberkompatibilität geprüft werden.
Warum ist die Antriebsspannung so wichtig?
Eine höhere Spannung verbessert in vielen Fällen das Drehmomentverhalten bei höheren Drehzahlen. Gleichzeitig muss die Spannung immer zum Treiber und zur Wicklungsauslegung passen.
Was ist der Unterschied zwischen Haltemoment und Drehmoment?
Haltemoment beschreibt das Drehmoment im Stillstand. Dynamisches Drehmoment ist das verfügbare Drehmoment während der Bewegung.
Welche Rolle spielt der Antriebsstrom?
Der Antriebsstrom beeinflusst direkt das Drehmoment und die Erwärmung des Motors. Zu wenig Strom reduziert die Leistung, zu viel Strom kann den Motor überhitzen.
Wann ist ein zweiphasiger Schrittmotor sinnvoll?
Zweiphasige Schrittmotoren sind weit verbreitet und bieten eine gute Balance aus Kosten, Genauigkeit und Verfügbarkeit. Sie eignen sich für viele Standardanwendungen in der Automatisierung.
Wie kann ich den passenden Schrittmotor schneller auswählen?
Beginnen Sie mit dem benötigten Drehmoment, prüfen Sie anschließend Spannung, Strom, Schrittwinkel und Drehzahlbereich und gleichen Sie diese Werte mit dem Treiber ab.