
Schrittmotoren für präzise Positionierung in CNC/3D-Druck/Robotik. Tutorial: NEMA17 Open-Loop mit Arduino (SM1702).
1. Warum Schrittmotor Arduino
Präzise Position ohne Encoder
Pulse/Direction-Steuerung
Stabil Niedrigspeed
Günstig
2. NEMA17 für Arduino-Projekte
Warum NEMA17
42x42mm Standard
Viele Treiber/Zubehör
Balanciertes Torque/Preis
Leichte Montage
Open vs Closed Loop
Open-Loop für Prototyping/Education. Closed-Loop teurer/komplexer.
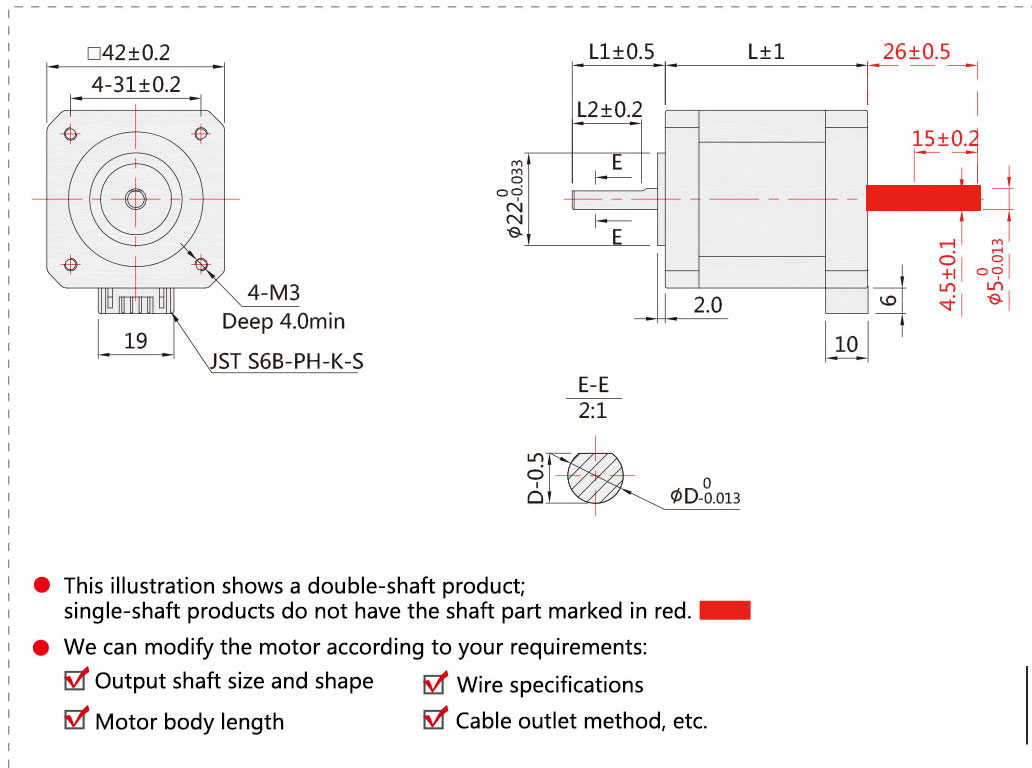
3. Motor-Spezifikationen
Motorgröße | NEMA17 (42mm) |
Typ | Zweiphasen Hybrid Open-Loop |
Schritt | 1.8° |
Strom | 1.4A/Phase |
Widerstand | 2.1Ω ±10% |
Induktivität | 3.4mH ±20% |
Haltemoment | 0.30Nm |
Duty | Kontinuierlich |
Isolierung | Klasse B |
Temp | -20°C bis +50°C |
Lebensdauer | >5000h |
Kompatibel A4988/DRV8825.
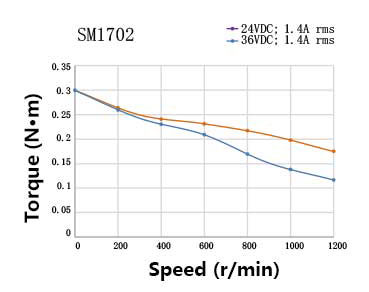
4. Drehmoment-Geschwindigkeit
Abhängig Spannung/Treiber. 24V→36V verbessert High-Speed-Torque.
Höhere Spannung erhält Drehmoment bei Speed.
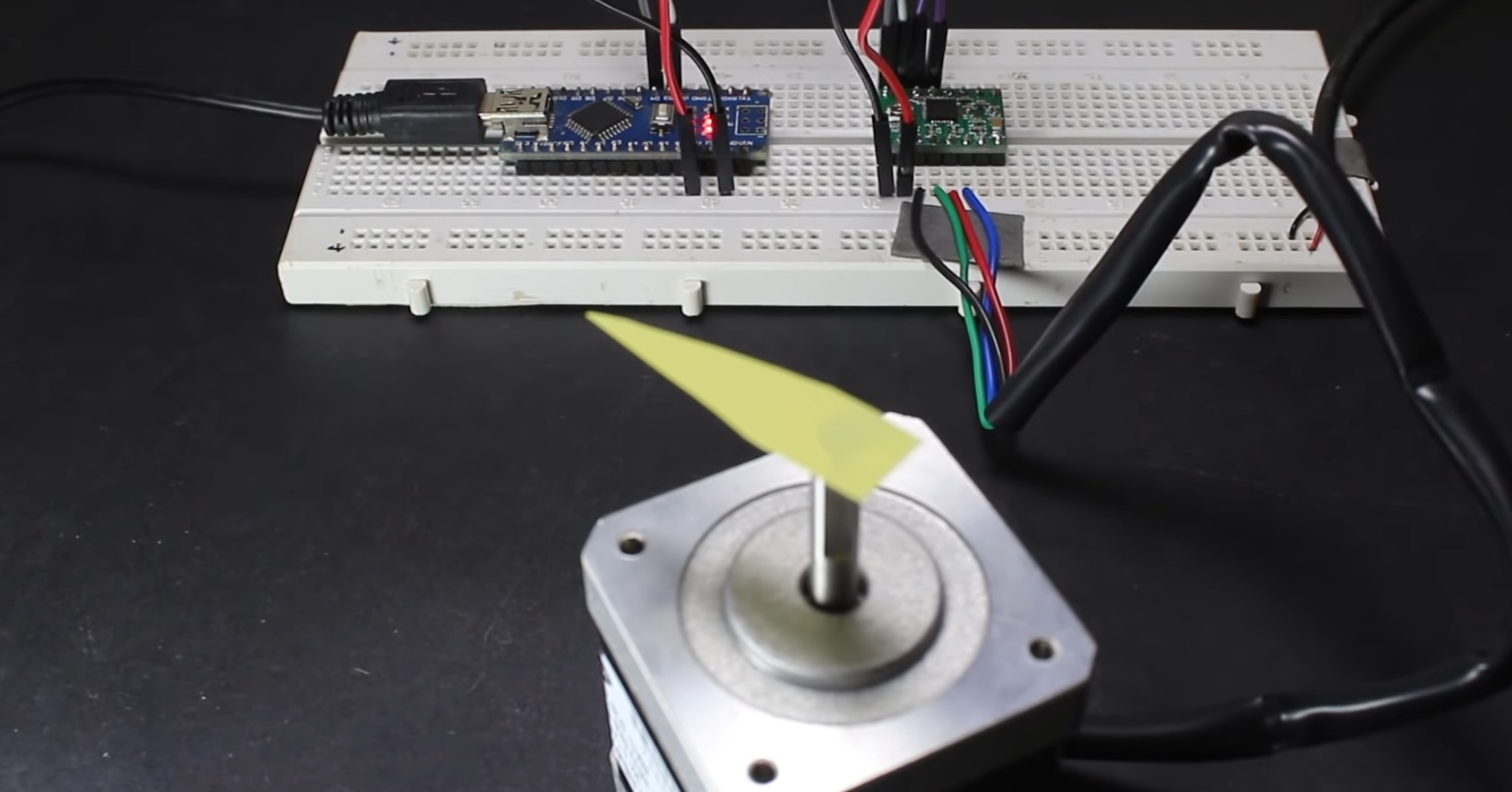
5. Hardware-Komponenten
Arduino Uno/Nano
NEMA17 (1.8°)
A4988/DRV8825 Treiber
12-36V Netzteil
Breadboard/Kabel
Heatsink optional
Externes Netzteil für Motor – nie Arduino!
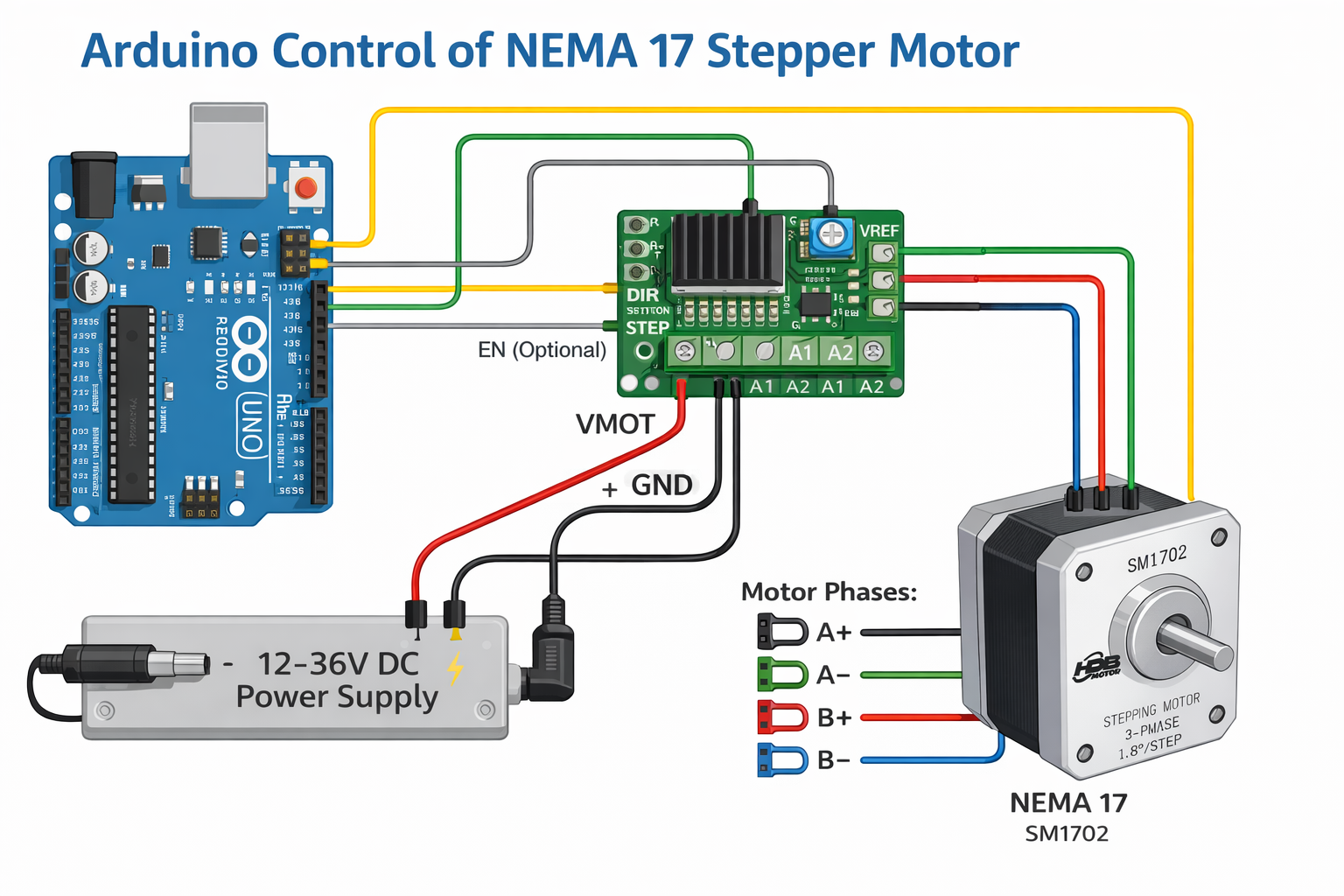
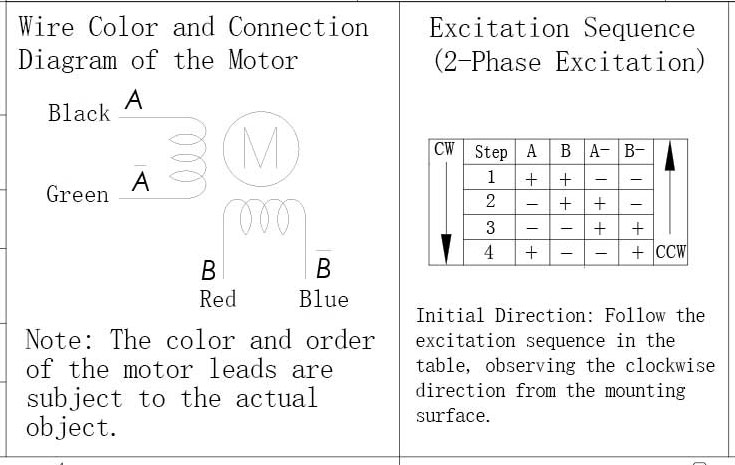
6. Verdrahtung Arduino A4988
Phase A → A1/A2
Phase B → B1/B2
STEP → Digipin
DIR → Digipin
ENABLE → GND/Arduino
VMOT → +Netzteil
GND → Common
7. Arduino Code Stepper Library
#include <Stepper.h>
const int stepsPerRevolution = 200;
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() { myStepper.setSpeed(300); }
void loop() {
myStepper.step(stepsPerRevolution); delay(1000);
myStepper.step(-stepsPerRevolution); delay(1000);
}
8. Strombegrenzung Treiber
Vref nach Datasheet für 1.4A einstellen – Überhitzung vermeiden.
9. Mechanische Integration
NEMA17 kompatibel mit Linearantrieben/Couplings.
10. Hochskalierung
NEMA23 für höhere Last
Closed-Loop bei Präzision
11. Anwendungen
CNC
3D-Drucker
Robotik
Labore
12. Fazit
NEMA17 SM1702 + Arduino = stabile Motion. Datenblätter/HDBMotor für Custom.
Empfohlene Artikel
FAQ Arduino Schrittmotor
Warum vibriert Motor?
Phasen falsch – Coil tauschen.
A4988 Strom einstellen?
Vref = Strom/2 (0.7V für 1.4A).
AccelStepper besser?
Ja – Rampen für Smoothness.