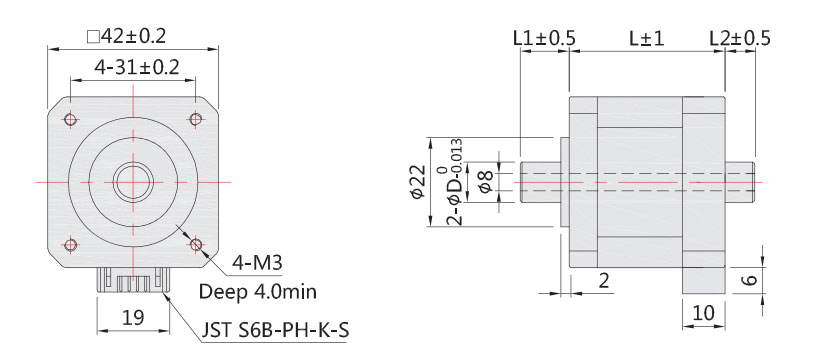
Wellenoptionen: Es stehen verschiedene Wellentypen zur Verfügung, darunter Einzelflachwelle, Doppelflachwelle, Keilnutwelle und Zahnradwelle.
Anschlusskabeloptionen: Kundenspezifische Wicklungs- und Anschlusskabelkonfigurationen können je nach Anwendungsanforderungen bereitgestellt werden.
Anwendungshinweise: Bei der Montage auf Passungen achten. Beim Anschließen des Motors an den Treiber dürfen die Phasen nicht falsch verdrahtet werden.
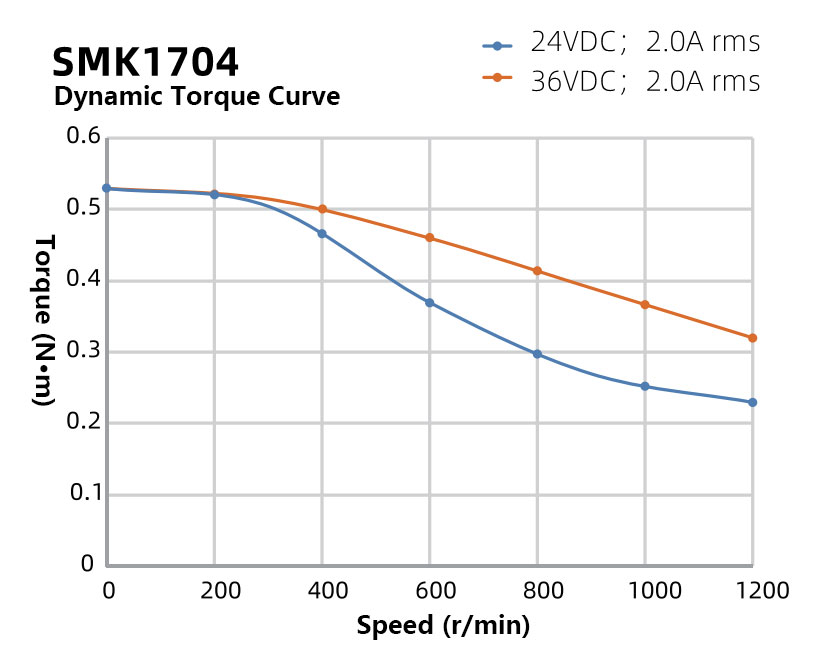
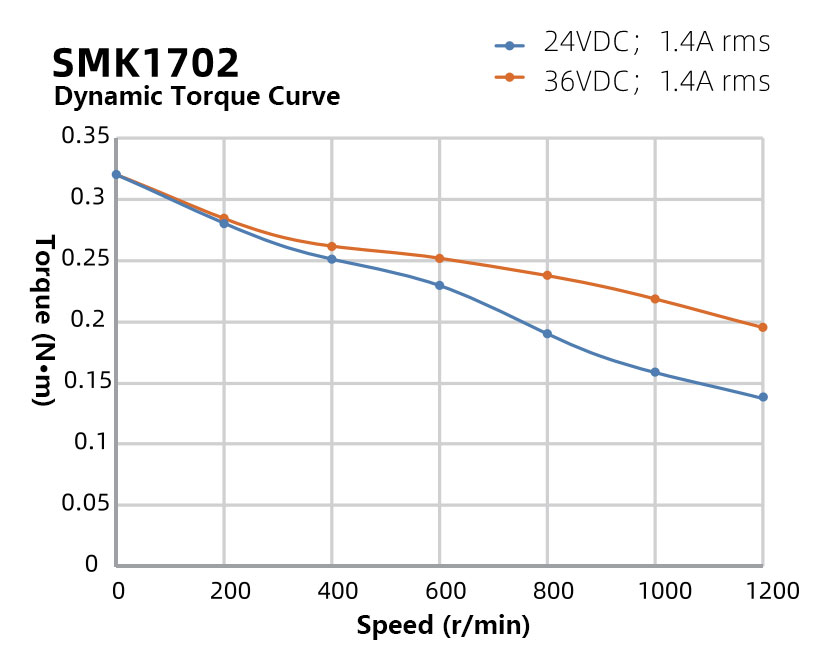
Schrittmotoren sind keine Motoren mit konstantem Drehmoment; Je höher die Betriebsgeschwindigkeit, desto kleiner das Ausgangsdrehmoment. Daher sollte bei gleichzeitiger Beachtung der Parameter des Motorhaltemoments mehr Aufmerksamkeit auf das Ausgangsdrehmoment des Motors bei tatsächlichen Betriebsdrehzahlen gelegt werden (siehe dynamische Drehmomentkurve). Wir empfehlen außerdem, einen 1,5-fachen Spielraum zu reservieren, um Schrittverluste aufgrund von Überlastung zu vermeiden.
| Modell | Haltemoment (Nm) | Nennstrom (A) | Rotorträgheit (g.cm²) | Motorlänge (mm) | Schaftinnendurchmesser (mm) | Empfohlener Treiber |
|---|---|---|---|---|---|---|
| SMK1702 | 0,32 | 1.4 | 33,0 | ≤35,0 | 8,0 | S-224D 12-48VDC |
| SMK1704 | 0,53 | 2,0 | 77,0 | ≤49,0 | 8,0 |
Der oben aufgeführte „empfohlene Treiber“ ist ein Schrittmotortreiber vom Impulstyp. Darüber hinaus können wir unseren Kunden Folgendes anbieten:
Bus-Schrittmotortreiber (RS485, CANopen, EtherCAT-Kommunikationssteuerung); Intelligente Schrittmotortreiber (Potentiometer-Geschwindigkeitssteuerung, integrierte SPS-Programmierfunktionen usw.).